New paper: Grasp model designed for rotation equivariance == greatly improved sample efficiency 🌀
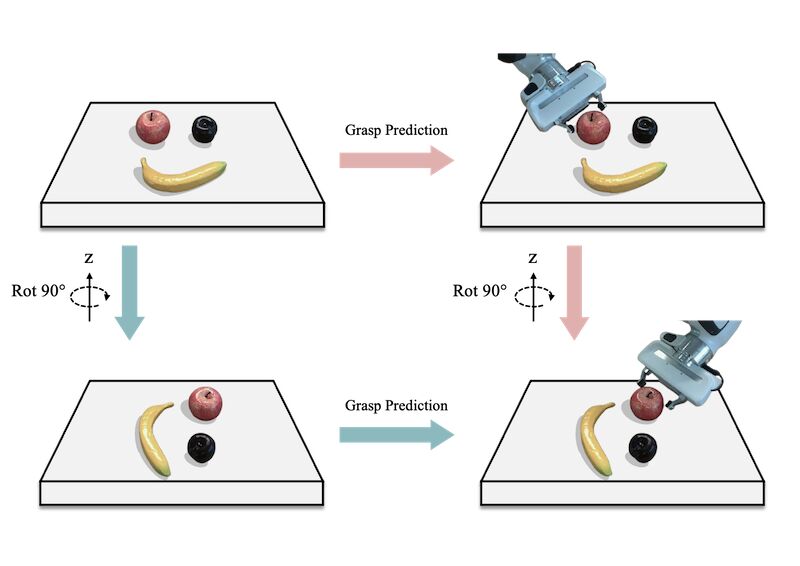
We are introducing a new volumetric grasp model [1] that is equivariant to rotations around the vertical axis, drastically improving sample efficiency ⚡:
- Our model uses a tri-plane volumetric feature representation, i.e., our model uses the projection of 3D features onto the three XYZ canonical planes.
- We specifically designed our new model such that features on the horizontal plane are equivariant to 90° rotations 🔄, while the sum of features from the other two planes remains invariant to reflections ↔️ induced by the same transformations.
- A key enabler is a new deformable steerable convolution, which combines the adaptability of deformable convolutions with the rotational equivariance of steerable ones 🕹️.
Check out the code & videos: 🔗 https://mousecpn.github.io/evg-page/
 arXiv
arXiv Bib
Bib PDF
PDF Blog
Blog