Publications
Many of these publications are copyrighted by their respective publishers. Downloadable versions are not necessarily identical to the published versions. They are made available here for personal use only.
-
Inproceedings
-
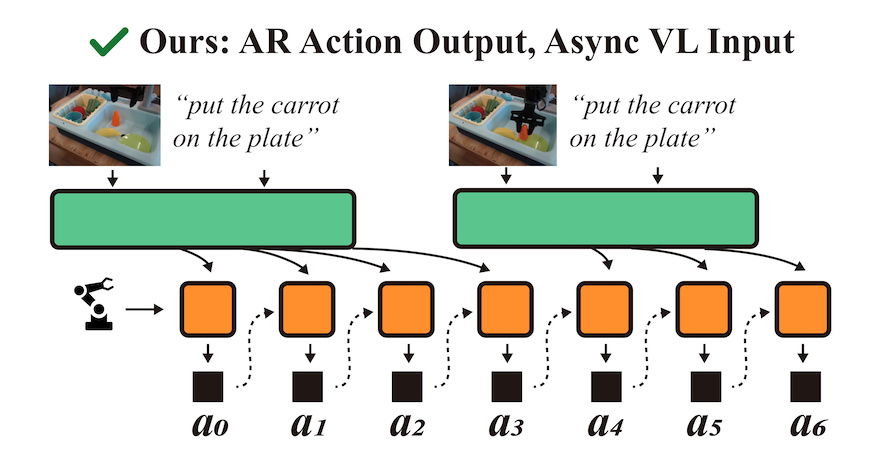
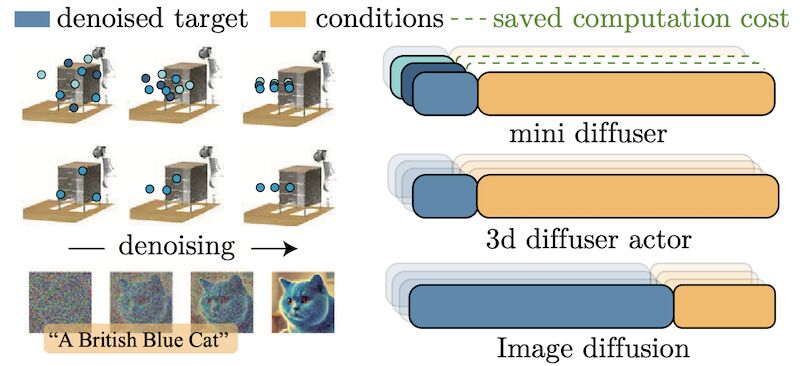
InproceedingsMini Diffuser: Accelerating Diffusion Policy Optimization via Two-Level Minibatching.In Reinforcement Learning for Industrial Logistics (RL4IL, ICRA Workshop), 2026.
-
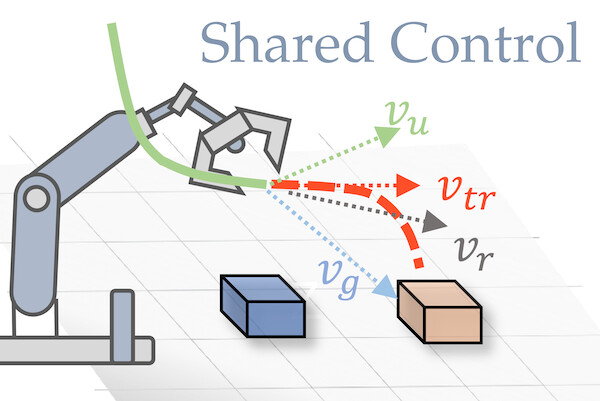
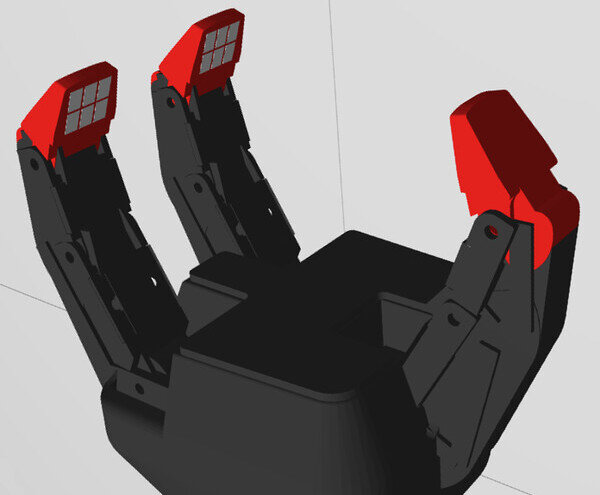
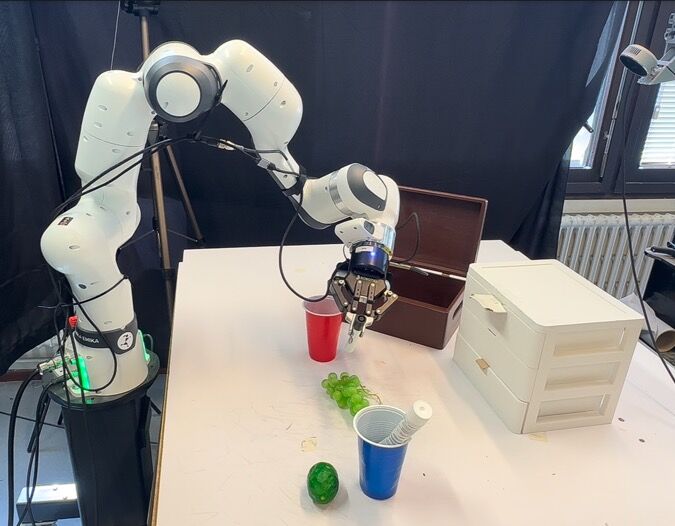
InproceedingsTask-Aware Shared Control for Teleoperated Manipulation.In NeuroDesign in Human-Robot Interaction (ICRA Workshop), 2026 (2nd Place – Best Innovation in HRI NeuroDesign).
-
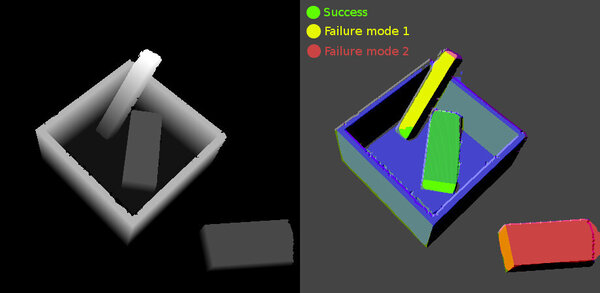
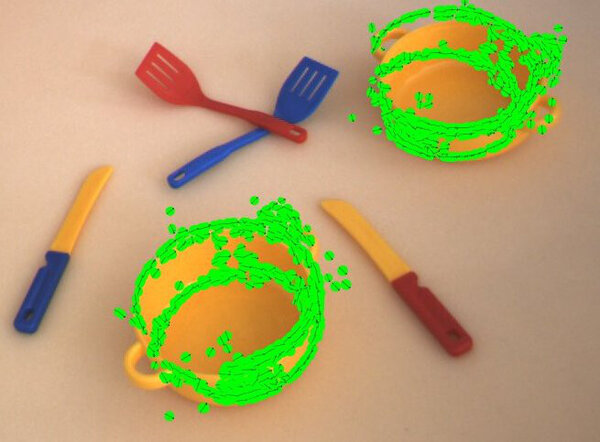
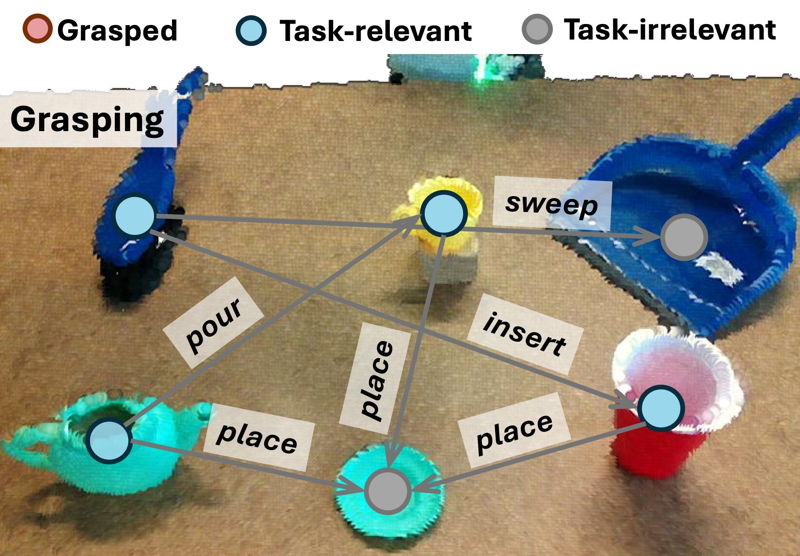
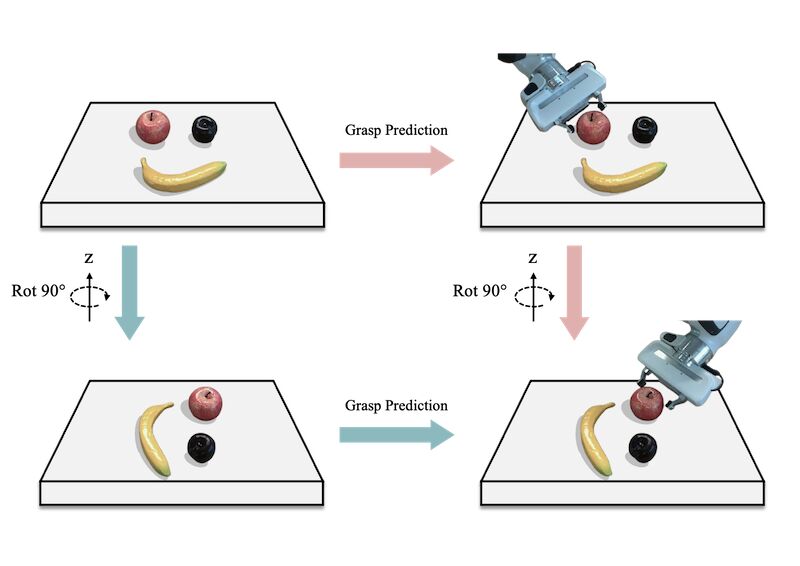
InproceedingsOne-Shot Learning of Manipulation from RGB-D Videos via Object-Centric Interaction Reasoning.In Beyond Teloperation: Learning from Diverse Human and Simulation Data (ICRA Workshop), 2026.
-
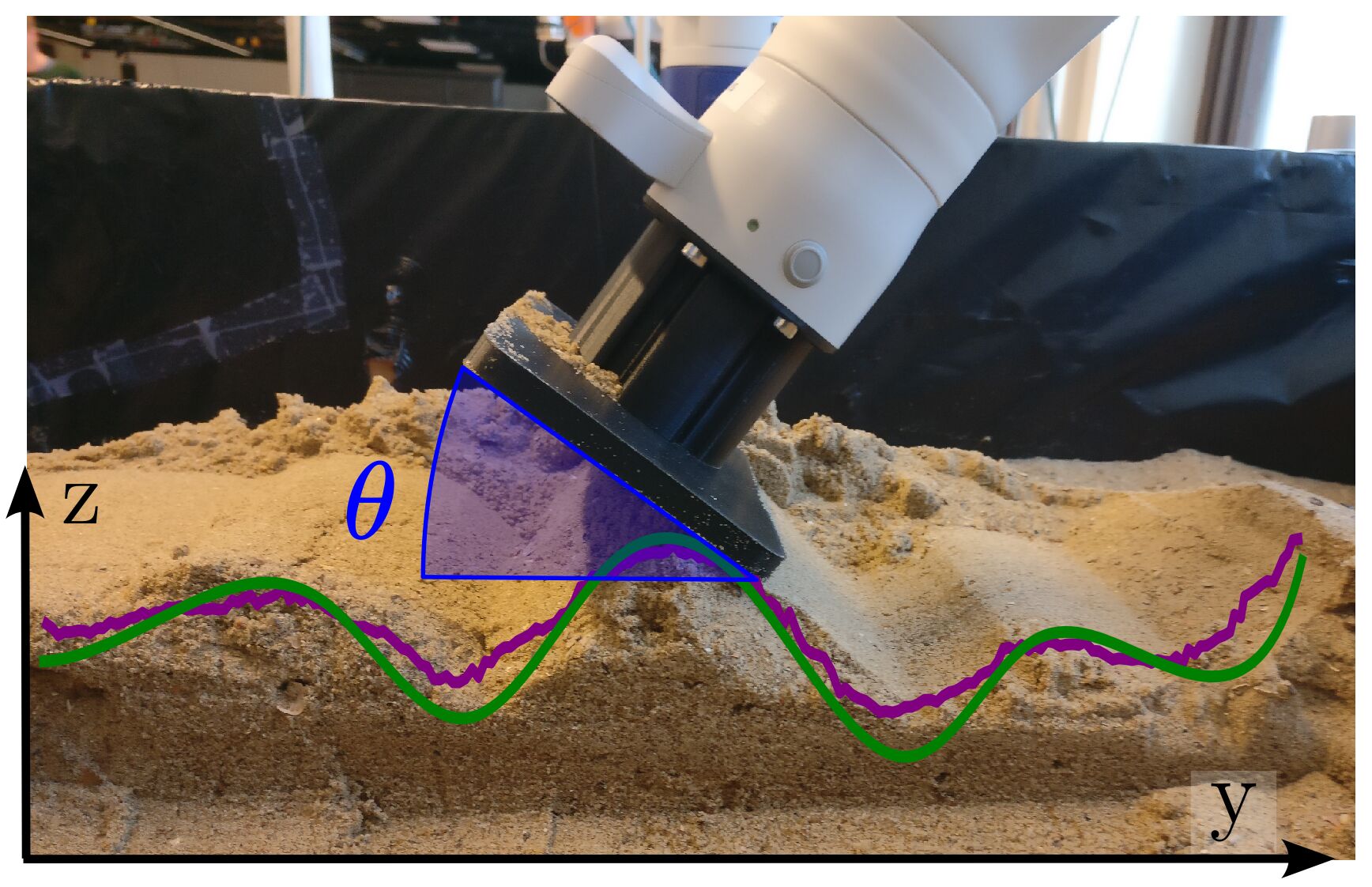
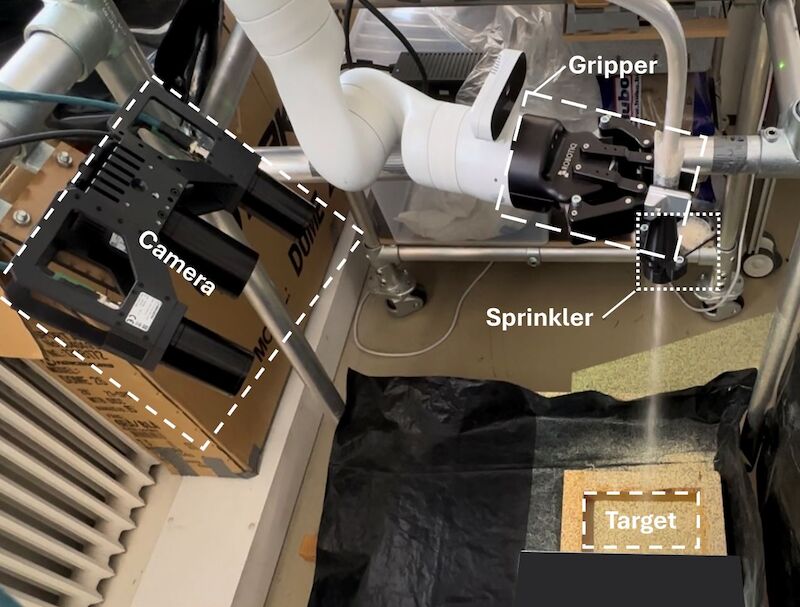
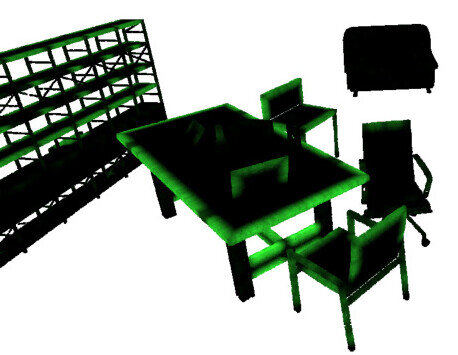
BeneluxSkill-based Layered Control Architecture for the Robotic Manipulation of Amorphous Materials.In 43rd Benelux Meeting on Systems and Control, 2024.
-
Inproceedings
-
Master’s Thesis
 arXiv
arXiv Bib
Bib PDF
PDF Blog
Blog
 DOI
DOI Video
Video