New IROS paper: Task-Aware Shared Control for Teleoperated Manipulation!
TASC: VLM-grounded shared control for relational telemanipulation 🤖 [1]
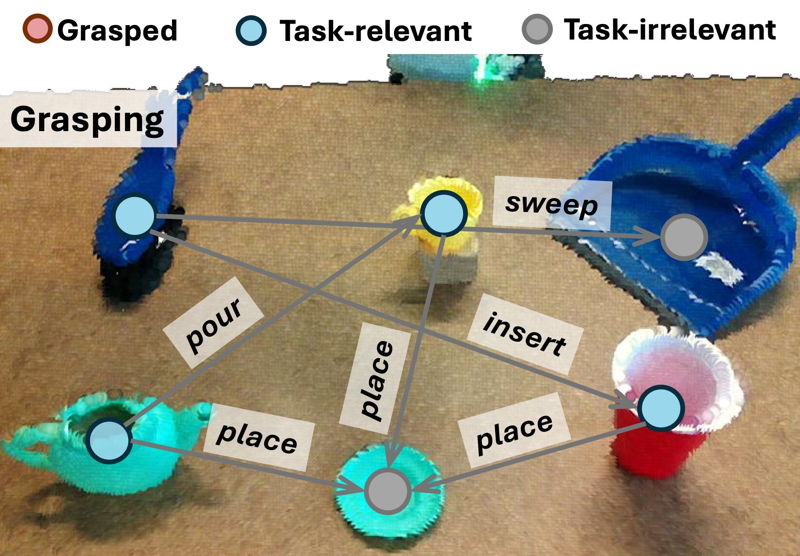
✅ Builds an open-vocabulary interaction graph from RGB-D + VLM reasoning, encoding task-relevant object–object relations and spatial affordances rather than relying on predefined templates.
✅ Uses the inferred relation to generate axis-alignment constraints between the grasped object and target object, then optimizes the gripper orientation during post-grasp interaction.
✅ In many tasks, the user can provide translational/positional input while TASC supplies the task-aware rotational assistance.
Check out the code & videos: https://fitz0401.github.io/tasc-page/
 arXiv
arXiv Bib
Bib PDF
PDF Blog
Blog