New paper accepted at CoRL 2024! 🚀🤖
Pinhao Song will be presenting our latest work at CoRL 2024! 🚀🤖 Pinhao has developed a new type of grasp planner that combines the best of two cutting-edge approaches in robotic grasping — dense prediction and sampling-based methods.
🔍 Dense prediction gives robots viable grasp points across a scene but can only predict one grasp per unit (think one grasp per voxel). 🌐 Sampling-based methods offer flexibility, allowing multiple grasp approaches at a single point. But they struggle with detailed grasping in cluttered scenes since they rely on global representations.
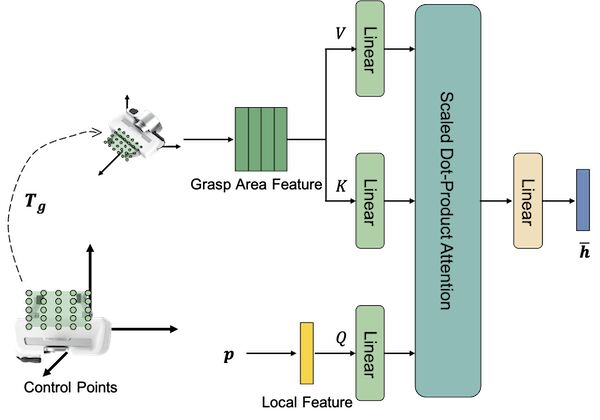
Implicit Grasp Diffusion (IGD) (Song et al., 2024) uses implicit neural representations to capture detailed local geometry and diffusion models to sample grasps continuously. The result? Smarter, more precise grasping, even in complex environments.
 Bib
Bib PDF
PDF