SatBuilder
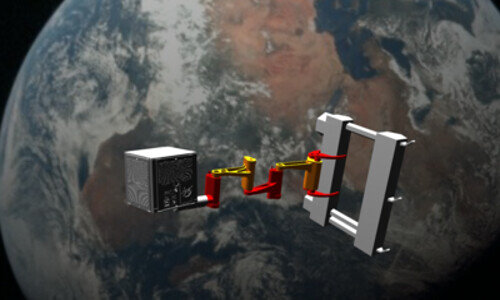
Autonomous visual manipulation for in-space assembly.
Period of Performance:
2018–2019
My role:
PI
Additional Contributors:
Shubham Sonawani (Ph.D. Student),
S. Kailas (Ph.D. Student),
Ryan Alimo,
Heni Ben Amor.

|
Funded by NASA's Jet Propulsion Laboratory (JPL). |

Autonomous visual manipulation for in-space assembly.
Period of Performance:
2018–2019
My role:
PI
Additional Contributors:
Shubham Sonawani (Ph.D. Student),
S. Kailas (Ph.D. Student),
Ryan Alimo,
Heni Ben Amor.
|
|
Funded by NASA's Jet Propulsion Laboratory (JPL). |
We developed means of localizing, tracking, and grasping known objects in visual conditions representative of Earth orbit and on compute solutions representative of space hardware. The project was validated on a JPL-designed 6U cubesat manipulator, demonstrating the assembly of a truss structure [1], [2].
 DOI
DOI Bib
Bib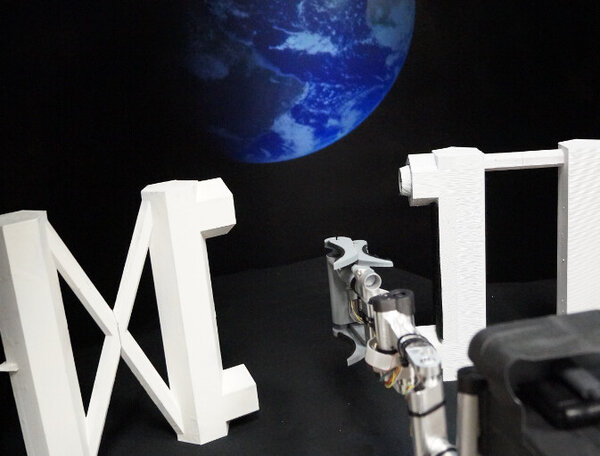
 PDF
PDF