New paper on robotic sand grading, to appear at ICRA 2025! 🏗️✨
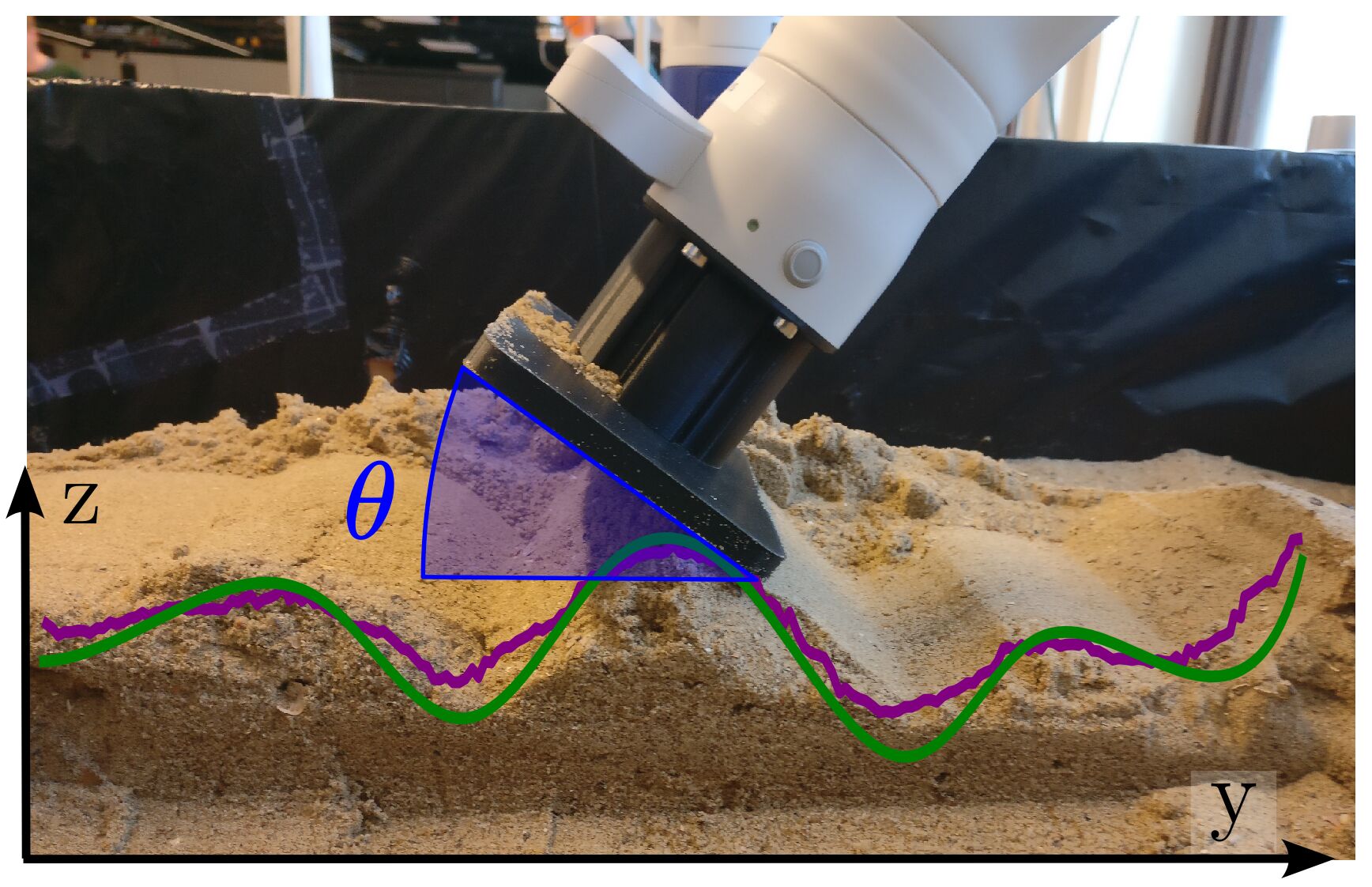
Louis Hanut’s latest paper [1] brings adaptive and iterative learning to robotic sand grading. Just like humans, the robot adjusts its actions in real time to shape sand with precision and efficiency. Key takeaways:
✅ Smarter tool control reduces force issues
✅ Adaptive grading angles prevent errors while shaping
✅ Dynamic speed adjustments balance accuracy & speed
This moves us closer to robots mastering amorphous materials for the RoBétArmé Project, construction robotics, and more. Congrats Louis!
 DOI
DOI Bib
Bib PDF
PDF Video
Video