RCTA/RoMan
Autonomous manipulation and mobility in unstructured terrain.
Period of Performance:
2016–2021
My role:
Task leader
Additional Contributors: Publication authors (see References below).

|
Funded by ARL. |

Autonomous manipulation and mobility in unstructured terrain.
Period of Performance:
2016–2021
My role:
Task leader
Additional Contributors: Publication authors (see References below).
|
|
Funded by ARL. |
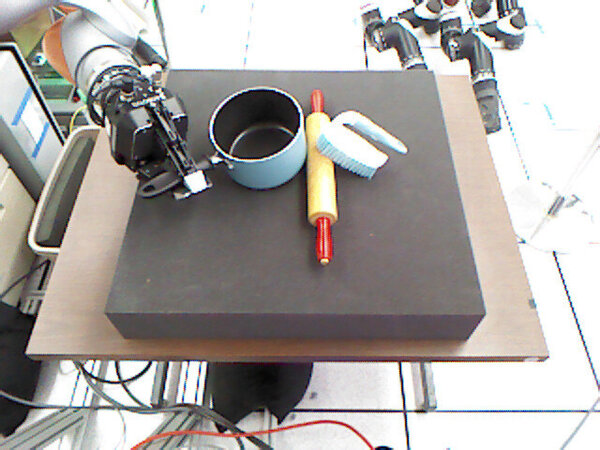
In this project, I led the development of an autonomous manipulation controller capable of autonomously deconstructing piles of unknown debris. The robot, a tracked bi-manual robot, autonomously located debris blocking its path, and manually extracted them to clear a path.

 Bib
Bib PDF
PDF
 DOI
DOI