UMM
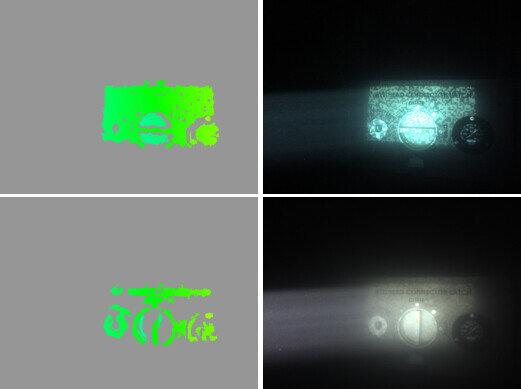
Autonomous mobile manipulation in turbid water.
Period of Performance:
2016–2019
My role:
Task leader
Additional Contributors: Publication authors (see References below).
Project website:
www-robotics.jpl.nasa.gov/what-we-do/research-tasks/underwater-mobile-manipulation/

|
Funded by NASA's Jet Propulsion Laboratory (JPL). |

Autonomous mobile manipulation in turbid water.
Period of Performance:
2016–2019
My role:
Task leader
Additional Contributors: Publication authors (see References below).
Project website:
www-robotics.jpl.nasa.gov/what-we-do/research-tasks/underwater-mobile-manipulation/
|
|
Funded by NASA's Jet Propulsion Laboratory (JPL). |
 Bib
Bib PDF
PDF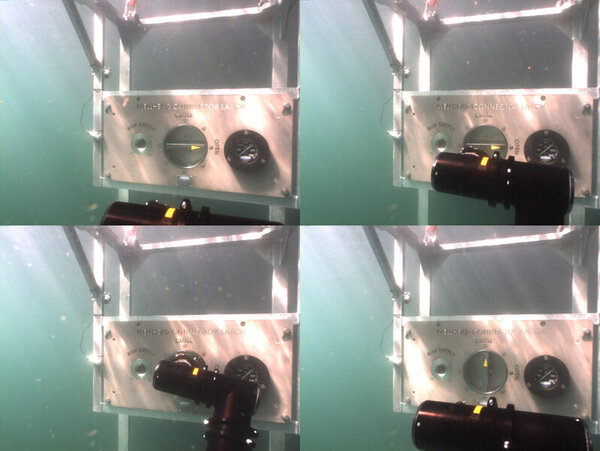
 DOI
DOI