Many of these publications are copyrighted by their respective publishers. Downloadable versions are not necessarily identical to the published versions. They are made available here for personal use only.
AREPO: Uncertainty-Aware Robot Ensemble Learning Under Extreme Partial Observability.
Yurui
Du, Louis
Hanut, Herman
Bruyninckx, and Renaud
Detry.
@article{du2025a,author={Du, Yurui and Hanut, Louis and Bruyninckx, Herman and Detry, Renaud},title={AREPO: Uncertainty-Aware Robot Ensemble Learning Under Extreme Partial Observability},year={2025},doi={10.1109/LRA.2025.3554451},journal={{IEEE} Robotics and Automation Letters},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
Robotic Framework for Iterative and Adaptive Profile Grading of Sand.
Louis
Hanut, Yurui
Du, Andrew
Vande Moere, Renaud
Detry, and Herman
Bruyninckx.
In IEEE International Conference on Robotics and Automation, 2025.
@inproceedings{hanut2025a,author={Hanut, Louis and Du, Yurui and Vande Moere, Andrew and Detry, Renaud and Bruyninckx, Herman},title={Robotic Framework for Iterative and Adaptive Profile Grading of Sand},year={2025},booktitle={{IEEE} International Conference on Robotics and Automation},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
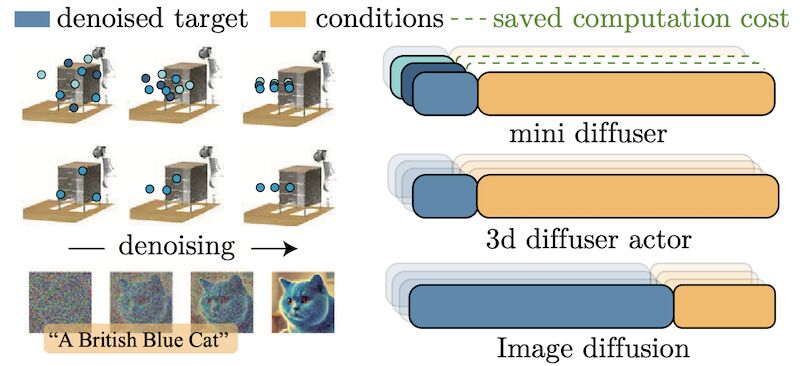
Train a Multi-Task Diffusion Policy on RLBench-18 in One Day with One GPU.
Yutong
Hu, Pinhao
Song, Kehan
Wen, and Renaud
Detry.
@misc{hu2025a,author={Hu, Yutong and Song, Pinhao and Wen, Kehan and Detry, Renaud},title={Train a Multi-Task Diffusion Policy on RLBench-18 in One Day with One GPU},year={2025},archiveprefix={arXiv},eprint={2505.09430},primaryclass={cs.RO},url={https://arxiv.org/abs/2505.09430}}
@inproceedings{du2024a,author={Du, Yurui and Hanut, Louis and Bruyninckx, Herman and Detry, Renaud},title={Shotcrete Guidance in Harsh Environments with Uncertainty-Aware Reinforcement Learning},year={2024},booktitle={4th Workshop on Future of Construction: Safe, Reliable, and Precise Robots in Construction Environments (ICRA 2024 workshop)},}
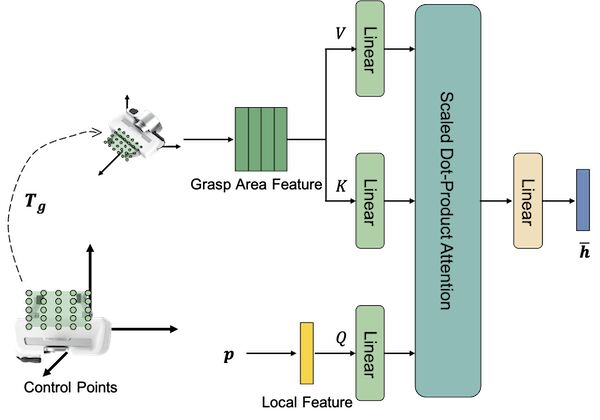
Implicit Grasp Diffusion: Bridging the Gap between Dense Prediction and Sampling-based Grasping.
@inproceedings{song2024b,author={Song, Pinhao and Li, Pengteng and Detry, Renaud},title={Implicit Grasp Diffusion: Bridging the Gap between Dense Prediction and Sampling-based Grasping},year={2024},booktitle={Conference on Robot Learning},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
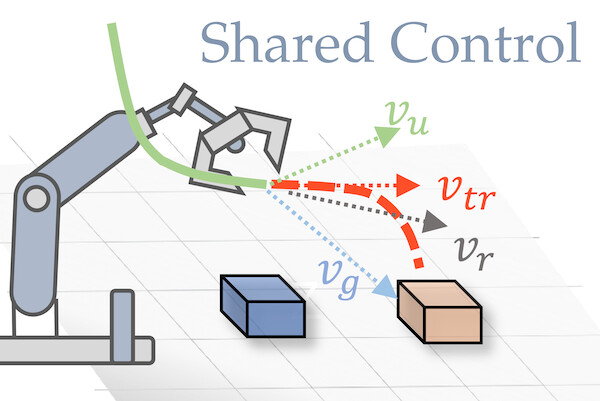
Robot Trajectron: Trajectory Prediction-based Shared Control for Robot Manipulation.
Pinhao
Song, Pengteng
Li, Erwin
Aertbelien, and Renaud
Detry.
In IEEE International Conference on Robotics and Automation, 2024.
@inproceedings{song2024a,author={Song, Pinhao and Li, Pengteng and Aertbelien, Erwin and Detry, Renaud},title={Robot Trajectron: Trajectory Prediction-based Shared Control for Robot Manipulation},year={2024},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ICRA57147.2024.10611507},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
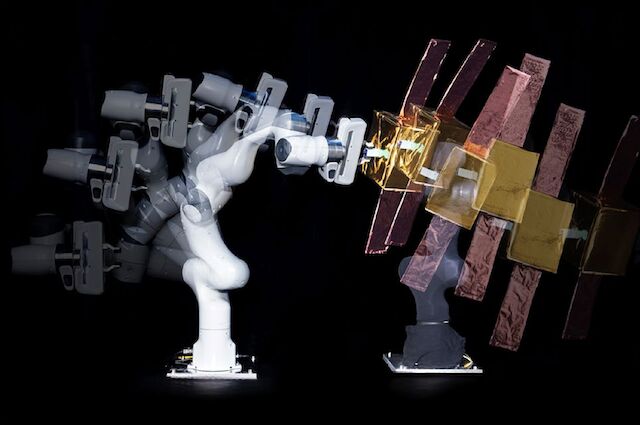
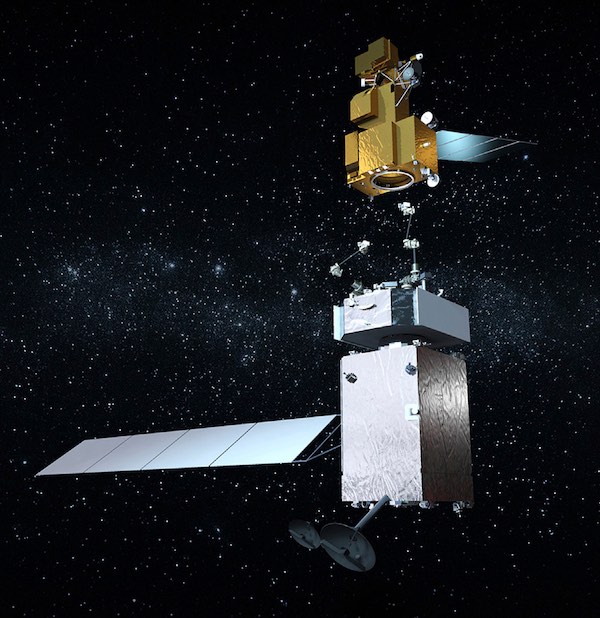
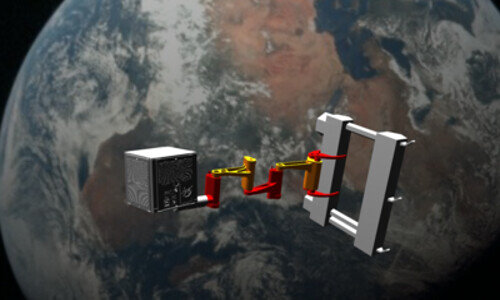
Robotic Upcycling and Recycling: Unraveling the Era of Sustainable In-Space Manufacturing.
Manu H.
Nair, Mini C.
Rai, Dirk
Schaefer, Renaud
Detry, Mithun
Poozhiyil, Justyna
Rybicka, Shan
Dulanty, Josie
Gotz, Maximo
Roa, Roberto
Lampariello, Shashank
Govindaraj, and Jeremi
Gancet.
@article{nair2024a,author={Nair, Manu H. and Rai, Mini C. and Schaefer, Dirk and Detry, Renaud and Poozhiyil, Mithun and Rybicka, Justyna and Dulanty, Shan and Gotz, Josie and Roa, Maximo and Lampariello, Roberto and Govindaraj, Shashank and Gancet, Jeremi},title={Robotic Upcycling and Recycling: Unraveling the Era of Sustainable In-Space Manufacturing},year={2024},doi={10.1007/s12567-024-00576-6},journal={CEAS Space Journal},}
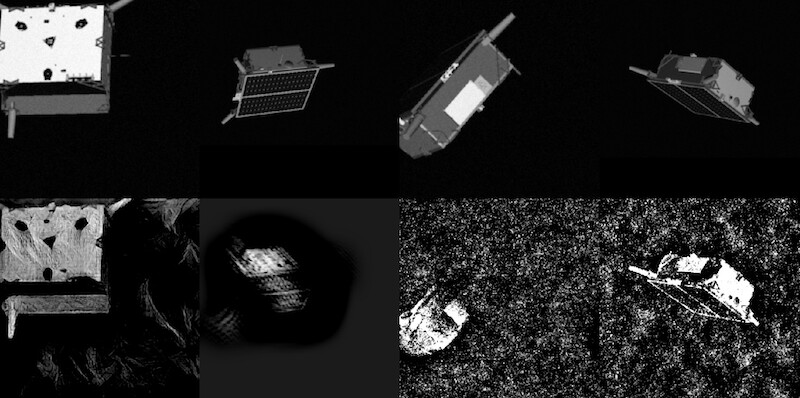
Leveraging Neural Radiance Fields for Pose Estimation of an Unknown Space Object during Proximity Operations.
Antoine
Legrand, Renaud
Detry, and Christophe De
Vleeschouwer.
In International Conference on Space Robotics, 2024 (Best poster award).
@inproceedings{legrand2024c,author={Legrand, Antoine and Detry, Renaud and Vleeschouwer, Christophe De},title={Leveraging Neural Radiance Fields for Pose Estimation of an Unknown Space Object during Proximity Operations},year={2024},archiveprefix={arXiv},booktitle={International Conference on Space Robotics},eprint={2405.12728},primaryclass={cs.CV},url={https://arxiv.org/abs/2405.12728}}
Domain Generalization for In-Orbit 6D Pose Estimation.
Antoine
Legrand, Renaud
Detry, and Christophe De
Vleeschouwer.
@misc{legrand2024b,author={Legrand, Antoine and Detry, Renaud and Vleeschouwer, Christophe De},title={Domain Generalization for In-Orbit 6D Pose Estimation},year={2024},archiveprefix={arXiv},eprint={2406.11743},primaryclass={cs.CV},url={https://arxiv.org/abs/2406.11743}}
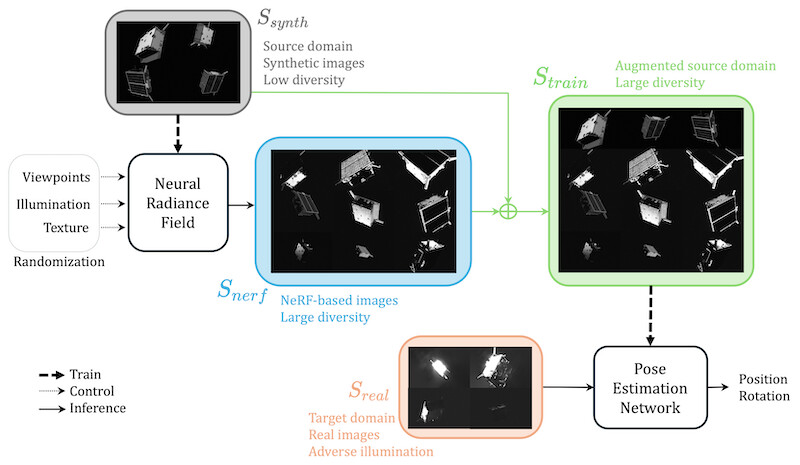
Domain Generalization for 6D Pose Estimation Through NeRF-based Image Synthesis.
Antoine
Legrand, Renaud
Detry, and Christophe De
Vleeschouwer.
@misc{legrand2024a,author={Legrand, Antoine and Detry, Renaud and Vleeschouwer, Christophe De},title={Domain Generalization for 6D Pose Estimation Through NeRF-based Image Synthesis},year={2024},archiveprefix={arXiv},eprint={2407.10762},primaryclass={cs.CV},url={https://arxiv.org/abs/2407.10762}}
Benelux
Skill-based Layered Control Architecture for the Robotic Manipulation of Amorphous Materials.
Louis
Hanut, Yurui
Du, Renaud
Detry, and Herman
Bruyninckx.
In 43rd Benelux Meeting on Systems and Control, 2024.
@inproceedings{hanut2024a,author={Hanut, Louis and Du, Yurui and Detry, Renaud and Bruyninckx, Herman},title={Skill-based Layered Control Architecture for the Robotic Manipulation of Amorphous Materials},year={2024},booktitle={43rd Benelux Meeting on Systems and Control},}
End-to-end Neural Estimation of Spacecraft Pose with Intermediate Detection of Keypoints.
Antoine
Legrand, Renaud
Detry, and Christophe
De Vleeschouwer.
@inproceedings{legrand2023a,author={Legrand, Antoine and Detry, Renaud and De Vleeschouwer, Christophe},title={End-to-end Neural Estimation of Spacecraft Pose with Intermediate Detection of Keypoints},year={2023},booktitle={Computer Vision -- ECCV 2022 Workshops},doi={10.1007/978-3-031-25056-9_11},pages={154--169},}
Human-Scale Mobile Manipulation Using RoMan.
Chad C.
Kessens, Matthew
Kaplan, Trevor
Rocks, Philip R.
Osteen, John
Rogers, Ethan
Stump, Arnon
Hurwitz, Jonathan
Fink, Long
Quang, Mark
Gonzalez, Jaymit
Patel, Michael
DiBlasi, Shiyani
Patel, Matthew
Weiker, Dilip
Patel, Joseph
Bowkett, Renaud
Detry, Sisir
Karumanchi, Larry
Matthies, Joel
Burdick, Yash
Oza, Aditya
Agarwal, Andrew
Dornbush, Dhruv Mauria
Saxena, Maxim
Likhachev, Karl
Schmeckpeper, Kostas
Daniilidis, Ajinkya
Kamat, Aditya
Mandalika, Sanjiban
Choudhury, and Siddhartha S.
Srinivasa.
@article{kessens2022q,author={Kessens, Chad C. and Kaplan, Matthew and Rocks, Trevor and Osteen, Philip R. and Rogers, John and Stump, Ethan and Hurwitz, Arnon and Fink, Jonathan and Quang, Long and Gonzalez, Mark and Patel, Jaymit and DiBlasi, Michael and Patel, Shiyani and Weiker, Matthew and Patel, Dilip and Bowkett, Joseph and Detry, Renaud and Karumanchi, Sisir and Matthies, Larry and Burdick, Joel and Oza, Yash and Agarwal, Aditya and Dornbush, Andrew and Saxena, Dhruv Mauria and Likhachev, Maxim and Schmeckpeper, Karl and Daniilidis, Kostas and Kamat, Ajinkya and Mandalika, Aditya and Choudhury, Sanjiban and Srinivasa, Siddhartha S.},title={Human-Scale Mobile Manipulation Using RoMan},year={2022},doi={10.55417/fr.2022041},journal={Field Robotics},pages={1232–1262},volume={2},}
Editorial: Robotic In-Situ Servicing, Assembly and Manufacturing.
Craig R.
Carignan, Renaud
Detry, Mini Chakravarthini
Saaj, Giacomo
Marani, and Joshua D.
Vander Hook.
@article{carignan2022c,author={Carignan, Craig R. and Detry, Renaud and Saaj, Mini Chakravarthini and Marani, Giacomo and Vander Hook, Joshua D.},title={Editorial: Robotic In-Situ Servicing, Assembly and Manufacturing},year={2022},doi={10.3389/frobt.2022.887506},issn={2296-9144},journal={Frontiers in Robotics and AI},url={https://www.frontiersin.org/article/10.3389/frobt.2022.887506},volume={9}}
Grasping and Transport of Unstructured Collections of Massive Objects.
Joseph
Bowkett, Sisir
Karumanchi, and Renaud
Detry.
@article{bowkett2022q,author={Bowkett, Joseph and Karumanchi, Sisir and Detry, Renaud},title={Grasping and Transport of Unstructured Collections of Massive Objects},year={2022},doi={10.55417/fr.2022014},journal={Field Robotics},pages={385–405},volume={2},}
Sample-Tube Pose Estimation Based on Two- Stage Approach for Fetching on Mars Surface.
Israel Raul
Tiñini Alvarez, Ignacio
Perez, Tim
Wiese, Laura
Bielenberg, and Renaud
Detry.
In 16th Symposium on Advanced Space Technologies in Robotics and Automation, 2022.
@inproceedings{alvarez2022a,author={Tiñini Alvarez, Israel Raul and Perez, Ignacio and Wiese, Tim and Bielenberg, Laura and Detry, Renaud},title={Sample-Tube Pose Estimation Based on Two- Stage Approach for Fetching on Mars Surface},year={2022},booktitle={16th Symposium on Advanced Space Technologies in Robotics and Automation},}
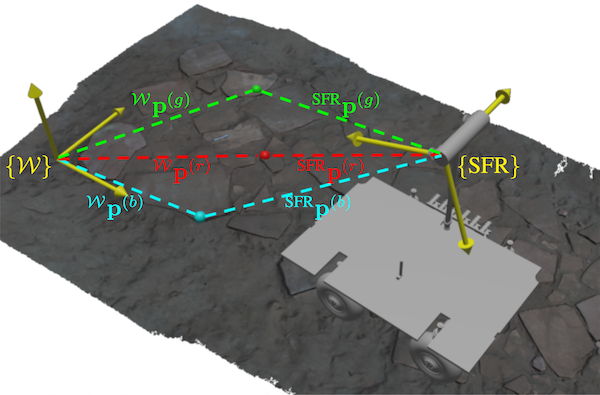
Rover Relocalization for Mars Sample Return by Virtual Template Synthesis and Matching.
Tu-Hoa
Pham, William
Seto, Shreyansh
Daftry, Barry
Ridge, Johanna
Hansen, Tristan
Thrush, Mark Van
Merwe, Gerard
Maggiolino, Alexander
Brinkman, John
Mayo, Yang
Cheng, Curtis
Padgett, Eric
Kulczycki, and Renaud
Detry.
@article{pham2021a,author={Pham, Tu-Hoa and Seto, William and Daftry, Shreyansh and Ridge, Barry and Hansen, Johanna and Thrush, Tristan and der Merwe, Mark Van and Maggiolino, Gerard and Brinkman, Alexander and Mayo, John and Cheng, Yang and Padgett, Curtis and Kulczycki, Eric and Detry, Renaud},title={Rover Relocalization for Mars Sample Return by Virtual Template Synthesis and Matching},year={2021},doi={10.1109/LRA.2021.3067281},journal={{IEEE} Robotics and Automation Letters},}
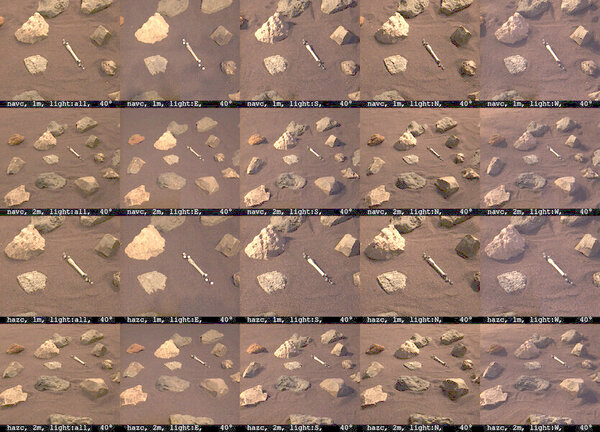
Machine Vision based Sample-Tube Localization for Mars Sample Return.
Shreyansh
Daftry, Barry
Ridge, William
Seto, Tu-Hoa
Pham, Peter
Ilhardt, Gerard
Maggiolino, Mark
Merwe, Alex
Brinkman, John
Mayo, Eric
Kulczyski, and Renaud
Detry.
@inproceedings{daftry2021g,author={Daftry, Shreyansh and Ridge, Barry and Seto, William and Pham, Tu-Hoa and Ilhardt, Peter and Maggiolino, Gerard and Van der Merwe, Mark and Brinkman, Alex and Mayo, John and Kulczyski, Eric and Detry, Renaud},title={Machine Vision based Sample-Tube Localization for Mars Sample Return},year={2021},booktitle={{IEEE Aerospace Conference}},doi={10.1109/AERO50100.2021.9438364},}
Robotic In-Space Assembly with Arm-Augmented Cubesats.
S.
Sonawani, S.
Kailas, R.
Detry, R.
Alimo, S.
Backus, R.
McCormick, R.
Mukherjee, K.
Wehage, and H. Ben
Amor.
In Opportunities and Challenges in Space Robotics (Workshop at ICRA 2020), 2020 (Best Poster Award).
@inproceedings{sonawani2020b,author={Sonawani, S. and Kailas, S. and Detry, R. and Alimo, R. and Backus, S. and McCormick, R. and Mukherjee, R. and Wehage, K. and Amor, H. Ben},title={Robotic In-Space Assembly with Arm-Augmented Cubesats},year={2020},booktitle={Opportunities and Challenges in Space Robotics (Workshop at ICRA 2020)},}
Assistive Relative Pose Estimation for On-orbit Assembly using Convolutional Neural Networks.
Shubham
Sonawani, Ryan
Alimo, Renuad
Detry, Daniel
Jeong, Andrew
Hess, and Heni Ben
Amor.
@inproceedings{sonawani2020a,author={Sonawani, Shubham and Alimo, Ryan and Detry, Renuad and Jeong, Daniel and Hess, Andrew and Amor, Heni Ben},title={Assistive Relative Pose Estimation for On-orbit Assembly using Convolutional Neural Networks},year={2020},booktitle={AIAA SciTech Forum},doi={10.2514/6.2020-2096},url={https://arc.aiaa.org/doi/pdf/10.2514/6.2020-2096}}
Rover Localization for Tube Pickup: Dataset, Methods and Validation for Mars Sample Return Planning.
Tu-Hoa
Pham, William
Seto, Shreyansh
Daftry, Alexander
Brinkman, John
Mayo, Yang
Cheng, Curtis
Padgett, Eric
Kulczycki, and Renaud
Detry.
@inproceedings{pham2020a,author={Pham, Tu-Hoa and Seto, William and Daftry, Shreyansh and Brinkman, Alexander and Mayo, John and Cheng, Yang and Padgett, Curtis and Kulczycki, Eric and Detry, Renaud},title={Rover Localization for Tube Pickup: Dataset, Methods and Validation for Mars Sample Return Planning},year={2020},booktitle={{IEEE} Aerospace Conference},doi={10.1109/AERO47225.2020.9172300},}
Investigating Habitability with an Integrated Rock-Climbing Robot and Astrobiology Instrument Suite.
Kyle
Uckert, Aaron
Parness, Nancy
Chanover, Evan J.
Eshelman, Neil
Abcouwer, Jeremy
Nash, Renaud
Detry, Christine
Fuller, David
Voelz, Robert
Hull, David
Flannery, Rohit
Bhartia, Kenneth S.
Manatt, William J.
Abbey, and Penelope
Boston.
@article{uckert2020a,author={Uckert, Kyle and Parness, Aaron and Chanover, Nancy and Eshelman, Evan J. and Abcouwer, Neil and Nash, Jeremy and Detry, Renaud and Fuller, Christine and Voelz, David and Hull, Robert and Flannery, David and Bhartia, Rohit and Manatt, Kenneth S. and Abbey, William J. and Boston, Penelope},title={Investigating Habitability with an Integrated Rock-Climbing Robot and Astrobiology Instrument Suite},year={2020},doi={10.1089/ast.2019.2177},journal={Astrobiology},}
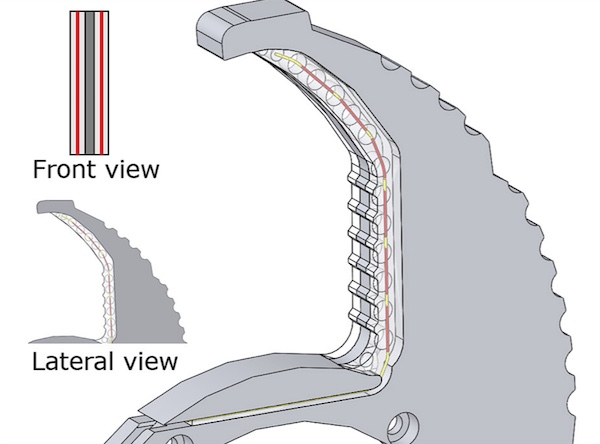
@inproceedings{prasanna2019a,author={Prasanna, Sahana and Massari, Luca and Sinibaldi, Edoardo and Detry, Renaud and Bowkett, Joseph and Carpenter, Kalind and Oddo, Calogero Maria},title={Neuromorphic tactile sensor array based on fiber Bragg gratings to encode object qualities},year={2019},booktitle={SPIE Optics + Photonics},doi={10.1117/12.2530733}}
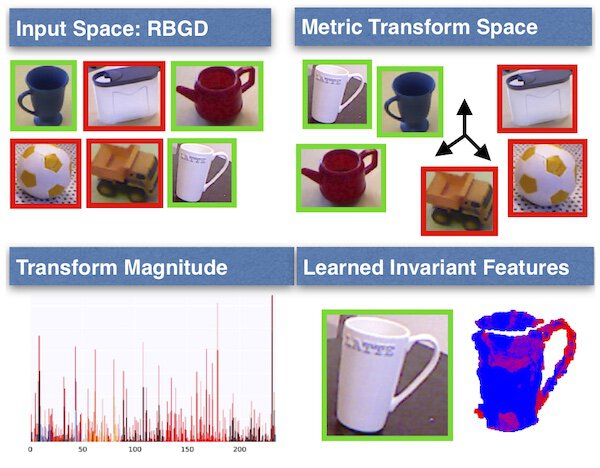
Invariant Feature Mappings for Generalizing Affordance Understanding Using Regularized Metric Learning.
Martin
Hjelm, Carl Henrik
Ek, Renaud
Detry, and Danica
Kragic.
@article{hjelm2019a,author={Hjelm, Martin and Ek, Carl Henrik and Detry, Renaud and Kragic, Danica},title={Invariant Feature Mappings for Generalizing Affordance Understanding Using Regularized Metric Learning},year={2019},journal={arXiv preprint arXiv:1901.10673},}
Tactile Sensing and Control of Robotic Manipulator Integrating Fiber Bragg Grating Strain-Sensor.
Luca
Massari, Calogero M.
Oddo, Edoardo
Sinibaldi, Renaud
Detry, Joseph
Bowkett, and Kalind C.
Carpenter.
@article{massari2019a,author={Massari, Luca and Oddo, Calogero M. and Sinibaldi, Edoardo and Detry, Renaud and Bowkett, Joseph and Carpenter, Kalind C.},title={Tactile Sensing and Control of Robotic Manipulator Integrating Fiber Bragg Grating Strain-Sensor},year={2019},doi={10.3389/fnbot.2019.00008},journal={Frontiers In Neurorobotics},}
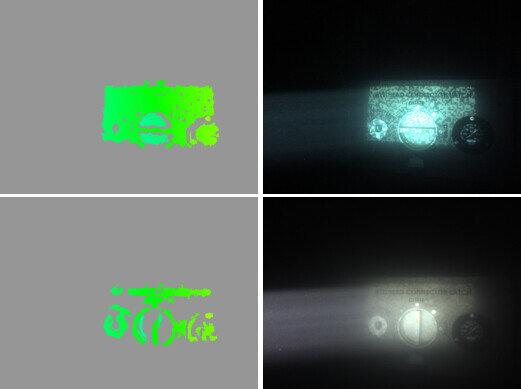
Reduced Backscatter for 3D Scene Reconstruction for Turbid Underwater Environments.
Philipp
Wu, Justin
Koch, Torkom
Pailevanian, Michael
Garrett, Dan
Levine, Christopher
Yahnker, Matthew
Gildner, Jeremy
Nash, and Renaud
Detry.
In Underwater Robotics Perception (ICRA 2019 Workshop), 2019.
@inproceedings{wu2019a,author={Wu, Philipp and Koch, Justin and Pailevanian, Torkom and Garrett, Michael and Levine, Dan and Yahnker, Christopher and Gildner, Matthew and Nash, Jeremy and Detry, Renaud},title={Reduced Backscatter for 3D Scene Reconstruction for Turbid Underwater Environments},year={2019},booktitle={Underwater Robotics Perception (ICRA 2019 Workshop)},}
Exploring Underwater Vent Systems: New Technologies and Strategies to Advance Life Detection and Scientific Understanding of Ocean Worlds.
Pablo
Sobron, Laura M
Barge, Jan
Amend, Justin
Burnett, Renaud
Detry, Ivria
Doloboff, Deborah S
Kelley, Aaron
Marburg, Anupam K
Misra, Anuscheh
Nawaz, and
others.
@inproceedings{sobron2018a,author={Sobron, Pablo and Barge, Laura M and Amend, Jan and Burnett, Justin and Detry, Renaud and Doloboff, Ivria and Kelley, Deborah S and Marburg, Aaron and Misra, Anupam K and Nawaz, Anuscheh and others},title={Exploring Underwater Vent Systems: New Technologies and Strategies to Advance Life Detection and Scientific Understanding of Ocean Worlds},year={2018},booktitle={AGU Fall Meeting Abstracts},}
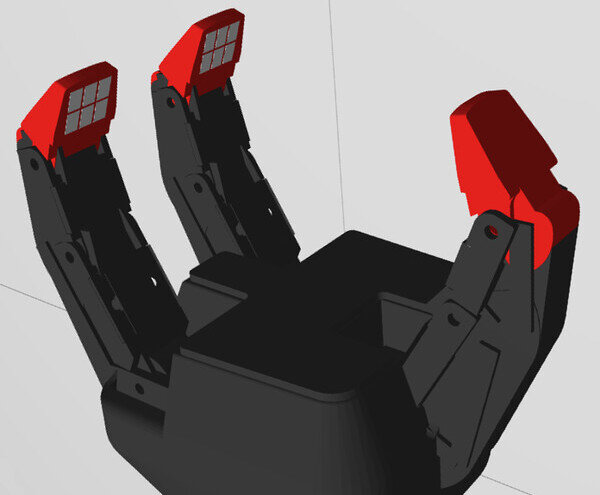
Development of a Robotic Limb for Underwater Mobile Manipulation.
Justin
Koch, Torkom
Pailevanian, Michael
Garrett, Christopher
Yahnker, Renaud
Detry, Dan
Levine, and Matthew
Gildner.
@inproceedings{koch2018a,author={Koch, Justin and Pailevanian, Torkom and Garrett, Michael and Yahnker, Christopher and Detry, Renaud and Levine, Dan and Gildner, Matthew},title={Development of a Robotic Limb for Underwater Mobile Manipulation},year={2018},booktitle={{MTS/IEEE} OCEANS},doi={10.1109/OCEANSKOBE.2018.8559128},}
Monocular Visual Pose Estimation via Online Sampling for Mars Sample-Tube Pickup.
Bhoram
Lee, Renaud
Detry, Jasmine
Moreno, Daniel D.
Lee, and Eric
Kulczycki.
@inproceedings{lee2018a,author={Lee, Bhoram and Detry, Renaud and Moreno, Jasmine and Lee, Daniel D. and Kulczycki, Eric},title={Monocular Visual Pose Estimation via Online Sampling for Mars Sample-Tube Pickup},year={2018},booktitle={{IEEE} Aerospace Conference},doi={10.1109/AERO.2018.8396698},}
Incollection
Enceladus Vent Explorer Concept.
Masahiro
Ono, Karl
Mitchel, Aaron
Parness, Kalind
Carpenter, Saverio
Iacoponi, Ellie
Simonson, Aaron
Curtis, Mitch
Ingham, Charles
Budney, Tara
Estlin, Carolyn
Parcheta, Renaud
Detry, Jeremy
Nash, Jean-Pierre
Croix, Jessie
Kawata, and Kevin
Hand.
In Outer Solar System: Prospective Energy and Material Resources, 2018.
@incollection{ono2018a,author={Ono, Masahiro and Mitchel, Karl and Parness, Aaron and Carpenter, Kalind and Iacoponi, Saverio and Simonson, Ellie and Curtis, Aaron and Ingham, Mitch and Budney, Charles and Estlin, Tara and Parcheta, Carolyn and Detry, Renaud and Nash, Jeremy and de la Croix, Jean-Pierre and Kawata, Jessie and Hand, Kevin},title={Enceladus Vent Explorer Concept},year={2018},booktitle={Outer Solar System: Prospective Energy and Material Resources},doi={10.1007/978-3-319-73845-1_13},editor={Badescu, Viorel and Zacny, Kris},isbn={978-3-319-73845-1},pages={665--717},publisher={Springer International Publishing}}
Tactile-Visual Integration for Task-Aware Grasping.
Mabel
Zhang, Andreas
Pas, Renaud
Detry, and Kostas
Daniilidis.
@inproceedings{zhang2018a,author={Zhang, Mabel and ten Pas, Andreas and Detry, Renaud and Daniilidis, Kostas},title={Tactile-Visual Integration for Task-Aware Grasping},year={2018},booktitle={RSS Pioneers (RSS 2018 Workshop)},}
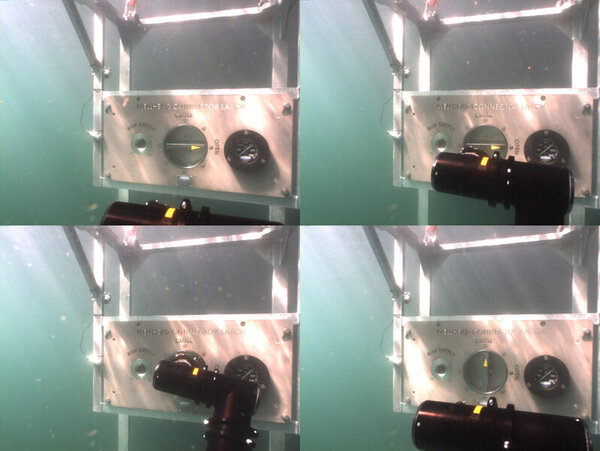
Turbid-water Subsea Infrastructure 3D Reconstruction with Assisted Stereo.
R.
Detry, J.
Koch, T.
Pailevanian, M.
Garrett, D.
Levine, C.
Yahnker, and M.
Gildner.
@inproceedings{detry2018a,author={Detry, R. and Koch, J. and Pailevanian, T. and Garrett, M. and Levine, D. and Yahnker, C. and Gildner, M.},title={Turbid-water Subsea Infrastructure 3D Reconstruction with Assisted Stereo},year={2018},booktitle={{MTS/IEEE} OCEANS},doi={10.1109/OCEANSKOBE.2018.8559091},}
@inproceedings{uckert2018a,author={Uckert, K and Parness, A and Chanover, N and Voelz, D and Boston, PJ and Bhartia, R and Flannery, D and Abcouwer, N and Fuller, C and Nash, J and Curtis, A and Detry, R and Hull, R},title={An Investigation of a Terrestrial Lava Tube with an Instrument Payload Integrated with the LEMUR Rock-Climbing Robot},year={2018},booktitle={AGU Fall Meeting Abstracts},}
Guest Editorial Open Discussion of Robot Grasping Benchmarks, Protocols, and Metrics.
J.
Mahler, R.
Platt, A.
Rodriguez, M.
Ciocarlie, A.
Dollar, R.
Detry, M. A.
Roa, H.
Yanco, A.
Norton, J.
Falco, K.
Wyk, E.
Messina, J.
Leitner, D.
Morrison, M.
Mason, O.
Brock, L.
Odhner, A.
Kurenkov, M.
Matl, and K.
Goldberg.
IEEE Transactions on Automation Science and Engineering, Oct 2018.
@article{mahler2018a,author={Mahler, J. and Platt, R. and Rodriguez, A. and Ciocarlie, M. and Dollar, A. and Detry, R. and Roa, M. A. and Yanco, H. and Norton, A. and Falco, J. and v. Wyk, K. and Messina, E. and Leitner, J. and Morrison, D. and Mason, M. and Brock, O. and Odhner, L. and Kurenkov, A. and Matl, M. and Goldberg, K.},title={Guest Editorial Open Discussion of Robot Grasping Benchmarks, Protocols, and Metrics},year={2018},doi={10.1109/TASE.2018.2871354},issn={1545-5955},journal={{IEEE} Transactions on Automation Science and Engineering},month=oct,number={4},pages={1440-1442},volume={15}}
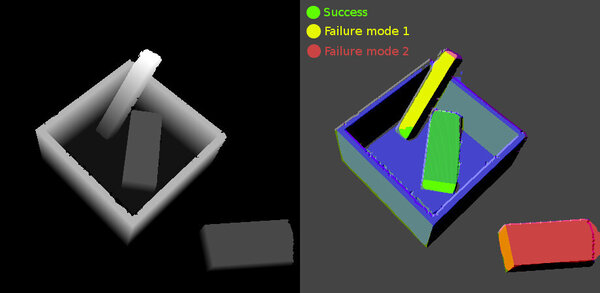
Semantic Understanding of Task Outcomes: Visually Identifying Failure Modes Autonomously Discovered in Simulation.
Joseph
Bowkett, Joel
Burdick, Larry
Matthies, and Renaud
Detry.
In Representing a Complex World: Perception, Inference, and Learning for Joint Semantic, Geometric, and Physical Understanding (ICRA 2018 Workshop), Oct 2018.
@inproceedings{bowkett2018a,author={Bowkett, Joseph and Burdick, Joel and Matthies, Larry and Detry, Renaud},title={Semantic Understanding of Task Outcomes: Visually Identifying Failure Modes Autonomously Discovered in Simulation},year={2018},booktitle={Representing a Complex World: Perception, Inference, and Learning for Joint Semantic, Geometric, and Physical Understanding (ICRA 2018 Workshop)},}
Tactile-Vision Integration for Task-Compatible Fine-Part Manipulation.
Mabel
Zhang, Renaud
Detry, Larry
Matthies, and Kostas
Daniilidis.
In Revisiting Contact – Turning a problem into a solution (RSS 2017 Workshop), Oct 2017.
@inproceedings{zhang2017a,author={Zhang, Mabel and Detry, Renaud and Matthies, Larry and Daniilidis, Kostas},title={Tactile-Vision Integration for Task-Compatible Fine-Part Manipulation},year={2017},booktitle={Revisiting Contact -- Turning a problem into a solution (RSS 2017 Workshop)},}
Semantic and Geometric Scene Understanding for Task-oriented Grasping of Novel Objects from a Single View.
Renaud
Detry, Jeremie
Papon, and Larry
Matthies.
In Learning and control for autonomous manipulation systems: the role of dimensionality reduction (ICRA 2017 Workshop), Oct 2017.
@inproceedings{detry2017b,author={Detry, Renaud and Papon, Jeremie and Matthies, Larry},title={Semantic and Geometric Scene Understanding for Task-oriented Grasping of Novel Objects from a Single View},year={2017},booktitle={Learning and control for autonomous manipulation systems: the role of dimensionality reduction (ICRA 2017 Workshop)},}
Task-oriented Grasping with Semantic and Geometric Scene Understanding.
Renaud
Detry, Jeremie
Papon, and Larry
Matthies.
In IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2017 (Best Paper Award in Cognitive Robotics).
@inproceedings{detry2017c,author={Detry, Renaud and Papon, Jeremie and Matthies, Larry},title={Task-oriented Grasping with Semantic and Geometric Scene Understanding},year={2017},booktitle={{IEEE/RSJ} International Conference on Intelligent Robots and Systems},doi={https://doi.org/10.1109/IROS.2017.8206162},}
Semantic and Geometric Scene Understanding for Single-view Task-oriented Grasping of Novel Objects.
Renaud
Detry, Jeremie
Papon, and Larry
Matthies.
In Workshop on Spatial-Semantic Representations in Robotics (RSS 2017 Workshop), Oct 2017.
@inproceedings{detry2017d,author={Detry, Renaud and Papon, Jeremie and Matthies, Larry},title={Semantic and Geometric Scene Understanding for Single-view Task-oriented Grasping of Novel Objects},year={2017},booktitle={Workshop on Spatial-Semantic Representations in Robotics (RSS 2017 Workshop)},}
Learning to Grasp with a Deep Network for 2D Context and Geometric Prototypes for 3D Structure.
Renaud
Detry, Jeremie
Papon, and Larry
Matthies.
In Learning and control for autonomous manipulation systems: the role of dimensionality reduction (ICRA 2017 Workshop), Oct 2017.
@inproceedings{detry2017a,author={Detry, Renaud and Papon, Jeremie and Matthies, Larry},title={Learning to Grasp with a Deep Network for 2D Context and Geometric Prototypes for 3D Structure},year={2017},booktitle={Learning and control for autonomous manipulation systems: the role of dimensionality reduction (ICRA 2017 Workshop)},}
Martian Fetch: Finding and Retrieving Sample-Tubes on the Surface of Mars.
Jeremie
Papon, Renaud
Detry, Peter
Vieira, Sawyer
Brooks, Thirupathi
Srinivasan, Ariel
Peterson, and Eric
Kulczycki.
@inproceedings{papon2017a,author={Papon, Jeremie and Detry, Renaud and Vieira, Peter and Brooks, Sawyer and Srinivasan, Thirupathi and Peterson, Ariel and Kulczycki, Eric},title={Martian Fetch: Finding and Retrieving Sample-Tubes on the Surface of Mars},year={2017},booktitle={{IEEE} Aerospace Conference},doi={https://doi.org/10.1109/AERO.2017.7943649},}
@inproceedings{hyttinen2017a,author={Hyttinen, Emil and Kragic, Danica and Detry, Renaud},title={Estimating tactile data for adaptive grasping of novel objects},year={2017},booktitle={{IEEE/RAS} International Conference on Humanoid Robots},doi={10.1109/HUMANOIDS.2017.8246940}}
@inproceedings{bekiroglu2016a,author={Bekiroglu, Yasemin and Damianou, Andreas and Detry, Renaud and Stork, Johannes A and Kragic, Danica and Ek, Carl Henrik},title={Probabilistic consolidation of grasp experience},year={2016},booktitle={{IEEE} International Conference on Robotics and Automation},doi={https://dx.doi.org/10.1109/ICRA.2016.7487133}}
Learning the Tactile Signatures of Prototypical Object Parts for Robust Part-based Grasping of Novel Objects.
Emil
Hyttinen, Danica
Kragic, and Renaud
Detry.
In IEEE International Conference on Robotics and Automation, Oct 2015.
@inproceedings{hyttinen2015a,author={Hyttinen, Emil and Kragic, Danica and Detry, Renaud},title={Learning the Tactile Signatures of Prototypical Object Parts for Robust Part-based Grasping of Novel Objects},year={2015},booktitle={{IEEE} International Conference on Robotics and Automation},doi={https://dx.doi.org/10.1109/ICRA.2015.7139883},}
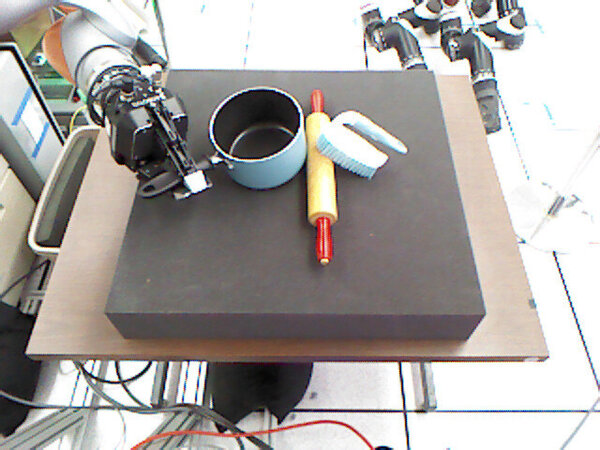
G3DB: A Database of Successful and Failed Grasps with RGB-D Images, Point Clouds, Mesh Models and Gripper Parameters.
Ashley
Kleinhans, Benjamin
Rosman, Michael
Michalik, Bryan
Tripp, and Renaud
Detry.
In Robotic Hands, Grasping and Manipulation (ICRA 2015 workshop), Oct 2015.
@inproceedings{kleinhans2015a,author={Kleinhans, Ashley and Rosman, Benjamin and Michalik, Michael and Tripp, Bryan and Detry, Renaud},title={{G3DB}: A Database of Successful and Failed Grasps with {RGB-D} Images, Point Clouds, Mesh Models and Gripper Parameters},year={2015},booktitle={Robotic Hands, Grasping and Manipulation (ICRA 2015 workshop)},}
One shot learning and generation of dexterous grasps for novel objects.
Marek
Kopicki, Renaud
Detry, Maxime
Adjigble, Rustam
Stolkin, Ales
Leonardis, and Jeremy
Wyatt.
International Journal of Robotics Research, Oct 2015.
@article{kopicki2015a,author={Kopicki, Marek and Detry, Renaud and Adjigble, Maxime and Stolkin, Rustam and Leonardis, Ales and Wyatt, Jeremy},title={One shot learning and generation of dexterous grasps for novel objects},year={2015},doi={https://dx.doi.org/10.1177/0278364915594244},journal={International Journal of Robotics Research},number={8},pages={959-976},volume={35},}
ICCV
Learning Human Priors for Task-Constrained Grasping.
Martin
Hjelm, Carl Henrik
Ek, Renaud
Detry, and Danica
Kragic.
In International Conference on Computer Vision Systems, Oct 2015.
@inproceedings{hjelm2015a,author={Hjelm, Martin and Ek, Carl Henrik and Detry, Renaud and Kragic, Danica},title={Learning Human Priors for Task-Constrained Grasping},year={2015},booktitle={International Conference on Computer Vision Systems},doi={10.1007/978-3-319-20904-3_20},publisher={Springer}}
@article{nalpantidis2015a,author={Nalpantidis, Lazaros and Detry, Renaud and Damen, Dima and Bleser, Gabriele and Cakmak, Maya and Erden, Mustafa Suphi},title={Cognitive Robotics Systems},year={2015},journal={Journal of Intelligent \& Robotic Systems},pages={3},publisher={Springer Nature BV},volume={80}}
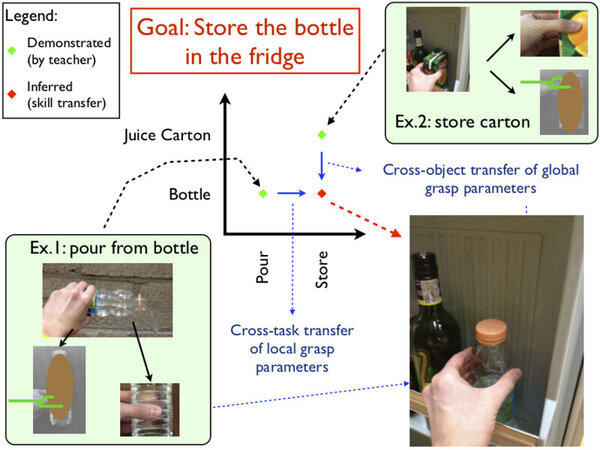
@inproceedings{hjelm2014a,author={Hjelm, Martin and Detry, Renaud and Ek, Carl Henrik and Kragic, Danica},title={Representations for Cross-task, Cross-object Grasp Transfer},year={2014},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ICRA.2014.6907697}}
Modelling primate control of grasping for robotics applications.
Ashley
Kleinhans, Serge
Thill, Benjamin
Rosman, Renaud
Detry, and Bryan
Tripp.
In Second Workshop on Affordances: Visual Perception of Affordances and Functional Visual Primitives for Scene Analysis (in conjunction with ECCV 2014), Oct 2014.
@inproceedings{kleinhans2014a,author={Kleinhans, Ashley and Thill, Serge and Rosman, Benjamin and Detry, Renaud and Tripp, Bryan},title={Modelling primate control of grasping for robotics applications},year={2014},booktitle={Second Workshop on Affordances: Visual Perception of Affordances and Functional Visual Primitives for Scene Analysis (in conjunction with ECCV 2014)},}
Learning Dexterous Grasps That Generalise To Novel Objects By Combining Hand And Contact Models.
Marek
Kopicki, Renaud
Detry, Florian
Schmidt, Christoph
Borst, Rustam
Stolkin, and Jeremy L.
Wyatt.
In IEEE International Conference on Robotics and Automation, Oct 2014.
@inproceedings{kopicki2014a,author={Kopicki, Marek and Detry, Renaud and Schmidt, Florian and Borst, Christoph and Stolkin, Rustam and Wyatt, Jeremy L.},title={Learning Dexterous Grasps That Generalise To Novel Objects By Combining Hand And Contact Models},year={2014},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ICRA.2014.6907647},}
Inproceedings
A vision-based autonomous inter-row weeder.
Sruthi Moorthy
Parvathi Krishna Moorthy, Renaud
Detry, Bernard
Boigelot, and Benoît
Mercatoris.
@inproceedings{detry2013b,author={Detry, Renaud and Hjelm, Martin and Ek, Carl Henrik and Kragic, Danica},title={Generalizing Task Parameters Through Modularization},year={2013},booktitle={Autonomous Learning Workshop (Workshop at ICRA 2013)},}
@inproceedings{hjelm2013a,author={Hjelm, Martin and Ek, Carl Henrik and Detry, Renaud and Kjellström, Hedvig and Kragic, Danica},title={Sparse Summarization of Robotic Grasping Data},year={2013},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ICRA.2013.6630707}}
Inertially-safe Grasping of Novel Objects.
Alexander
Rietzler, Renaud
Detry, Marek
Kopicki, Jeremy L.
Wyatt, and Justus
Piater.
In Cognitive Robotics Systems: Replicating Human Actions and Activities (Workshop at IROS 2013), Oct 2013.
@inproceedings{rietzler2013a,author={Rietzler, Alexander and Detry, Renaud and Kopicki, Marek and Wyatt, Jeremy L. and Piater, Justus},title={Inertially-safe Grasping of Novel Objects},year={2013},booktitle={Cognitive Robotics Systems: Replicating Human Actions and Activities (Workshop at IROS 2013)},}
Learning a Dictionary of Prototypical Grasp-predicting Parts from Grasping Experience.
Renaud
Detry, Carl Henrik
Ek, Marianna
Madry, and Danica
Kragic.
In IEEE International Conference on Robotics and Automation, Oct 2013.
@inproceedings{detry2013a,author={Detry, Renaud and Ek, Carl Henrik and Madry, Marianna and Kragic, Danica},title={Learning a Dictionary of Prototypical Grasp-predicting Parts from Grasping Experience},year={2013},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ICRA.2013.6630635},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
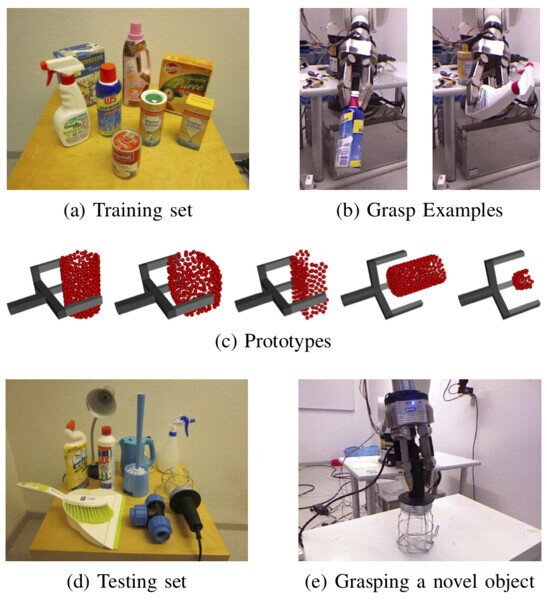
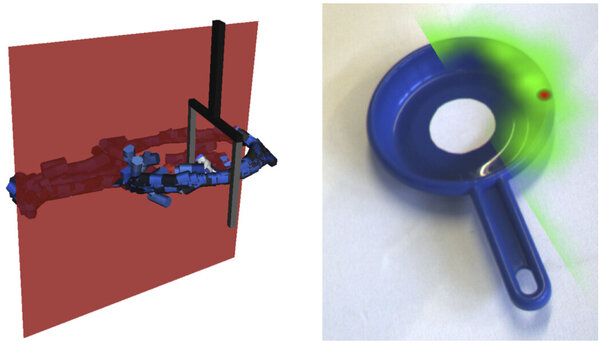
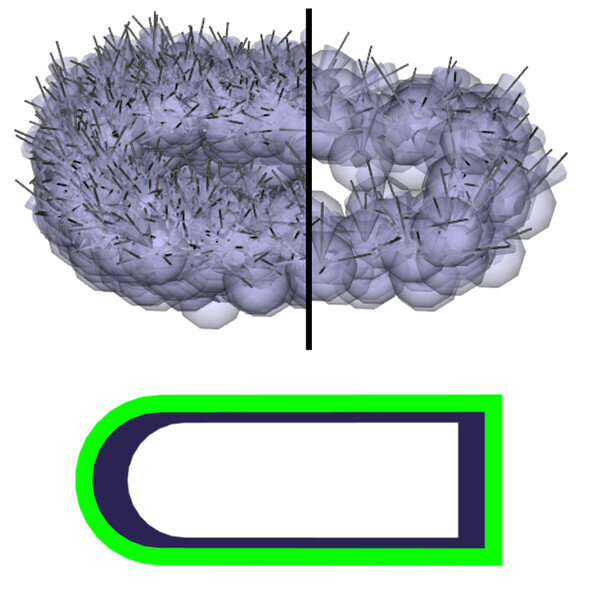
Unsupervised Learning Of Predictive Parts For Cross-object Grasp Transfer.
Renaud
Detry, and Justus
Piater.
In IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2013 (Finalist for the Best Cognitive Robotics Paper award).
@inproceedings{detry2013c,author={Detry, Renaud and Piater, Justus},title={Unsupervised Learning Of Predictive Parts For Cross-object Grasp Transfer},year={2013},booktitle={{IEEE/RSJ} International Conference on Intelligent Robots and Systems},doi={10.1109/IROS.2013.6696581},}
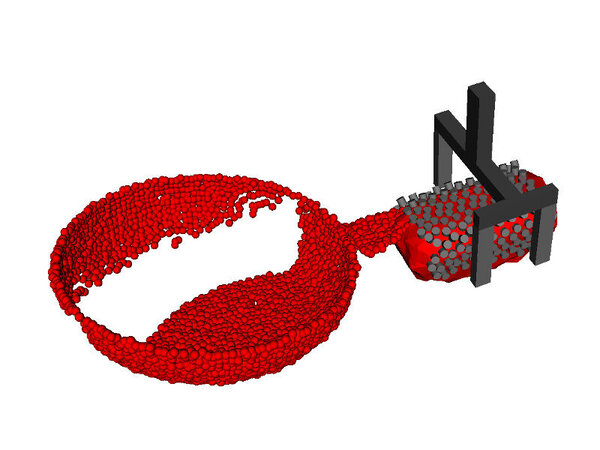
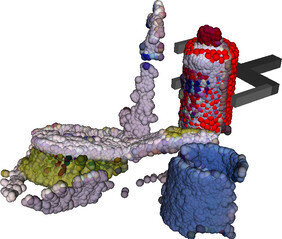
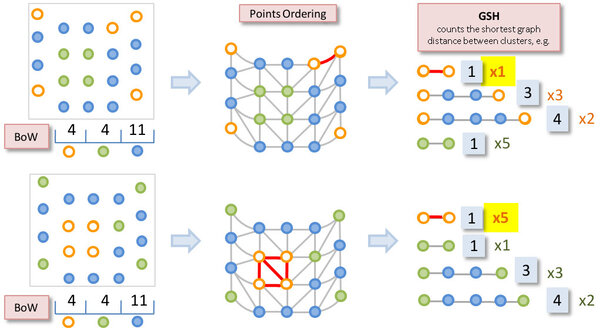
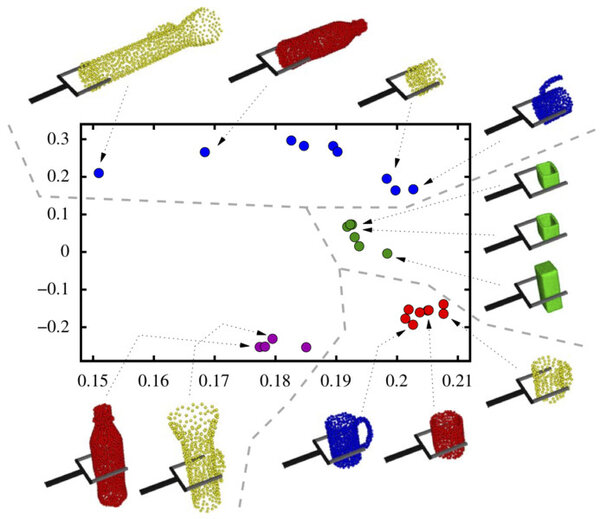
Improving Generalization for 3D Object Categorization with Global Structure Histograms.
Marianna
Madry, Carl Henrik
Ek, Renaud
Detry, Kaiyu
Hang, and Danica
Kragic.
In IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2012 (Finalist for the Best Cognitive Robotics Paper award).
@inproceedings{madry2012a,author={Madry, Marianna and Ek, Carl Henrik and Detry, Renaud and Hang, Kaiyu and Kragic, Danica},title={Improving Generalization for 3D Object Categorization with Global Structure Histograms},year={2012},booktitle={{IEEE/RSJ} International Conference on Intelligent Robots and Systems},doi={10.1109/IROS.2012.6385874},}
@inproceedings{bekiroglu2012b,author={Bekiroglu, Yasemin and Detry, Renaud and Kragic, Danica},title={Grasp Stability from Vision and Touch},year={2012},booktitle={Advances in Tactile Sensing and Touch-based Human Robot Interaction (Workshop at IROS 2012)},}
Generalizing Grasps Across Partly Similar Objects.
Renaud
Detry, Carl Henrik
Ek, Marianna
Madry, Justus
Piater, and Danica
Kragic.
In IEEE International Conference on Robotics and Automation, Oct 2012.
@inproceedings{detry2012a,author={Detry, Renaud and Ek, Carl Henrik and Madry, Marianna and Piater, Justus and Kragic, Danica},title={Generalizing Grasps Across Partly Similar Objects},year={2012},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ICRA.2012.6224992},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
Compressing Grasping Experience into a Dictionary of Prototypical Grasp-predicting Parts.
Renaud
Detry, Carl Henrik
Ek, Marianna
Madry, and Danica
Kragic.
In International Workshop on Human-Friendly Robotics, Oct 2012.
@inproceedings{detry2012b,author={Detry, Renaud and Ek, Carl Henrik and Madry, Marianna and Kragic, Danica},title={Compressing Grasping Experience into a Dictionary of Prototypical Grasp-predicting Parts},year={2012},booktitle={International Workshop on Human-Friendly Robotics},}
Learning Grasp Affordance Densities.
R.
Detry, D.
Kraft, O.
Kroemer, L.
Bodenhagen, J.
Peters, N.
Krüger, and J.
Piater.
Paladyn. Journal of Behavioral Robotics, Oct 2011.
@article{detry2011a,author={Detry, R. and Kraft, D. and Kroemer, O. and Bodenhagen, L. and Peters, J. and Krüger, N. and Piater, J.},title={Learning Grasp Affordance Densities},year={2011},doi={10.2478/s13230-011-0012-x},journal={Paladyn.\ Journal of Behavioral Robotics},number={1},pages={1--17},volume={2},}
What a successful grasp tells about the success chances of grasps in its vicinity.
Leon
Bodenhagen, Renaud
Detry, Justus
Piater, and Norbert
Krüger.
@inproceedings{bodenhagen2011a,author={Bodenhagen, Leon and Detry, Renaud and Piater, Justus and Krüger, Norbert},title={What a successful grasp tells about the success chances of grasps in its vicinity},year={2011},booktitle={ICDL-EpiRob},}
@inproceedings{bekiroglu2011c,author={Bekiroglu, Yasemin and Detry, Renaud and Kragic, Danica},title={Joint Observation of Object Pose and Tactile Imprints for Online Grasp Stability Assessment},year={2011},booktitle={Manipulation Under Uncertainty (Workshop at {IEEE} {ICRA} 2011)},}
Learning Tactile Characterizations Of Object- And Pose-specific Grasps.
Yasemin
Bekiroglu, Renaud
Detry, and Danica
Kragic.
In IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2011.
@inproceedings{bekiroglu2011d,author={Bekiroglu, Yasemin and Detry, Renaud and Kragic, Danica},title={Learning Tactile Characterizations Of Object- And Pose-specific Grasps},year={2011},booktitle={{IEEE/RSJ} International Conference on Intelligent Robots and Systems},doi={10.1109/IROS.2011.6094878},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
Learning Visual Representations for Perception-Action Systems.
Justus
Piater, Sébastien
Jodogne, Renaud
Detry, Dirk
Kraft, Norbert
Krüger, Oliver
Kroemer, and Jan
Peters.
International Journal of Robotics Research, Oct 2011.
@article{piater2011a,author={Piater, Justus and Jodogne, Sébastien and Detry, Renaud and Kraft, Dirk and Krüger, Norbert and Kroemer, Oliver and Peters, Jan},title={Learning Visual Representations for Perception-Action Systems},year={2011},doi={10.1177/0278364910382464},journal={International Journal of Robotics Research},number={3},pages={294--307},volume={30},}
Grasping with Vision Descriptors and Motor Primitives..
Oliver
Kroemer, Renaud
Detry, Justus
Piater, and Jan
Peters.
In International Conference on Informatics in Control, Automation and Robotics, Oct 2010 (Best Paper Award in Robotics and Automation).
@inproceedings{kroemer2010b,author={Kroemer, Oliver and Detry, Renaud and Piater, Justus and Peters, Jan},title={Grasping with Vision Descriptors and Motor Primitives.},year={2010},booktitle={International Conference on Informatics in Control, Automation and Robotics},doi={10.1007/978-3-642-19539-6_14},}
Continuous Surface-point Distributions for 3D Object Pose Estimation and Recognition.
@inproceedings{detry2010c,author={Detry, Renaud and Piater, Justus},title={Continuous Surface-point Distributions for {3D} Object Pose Estimation and Recognition},year={2010},booktitle={Asian Conference on Computer Vision},doi={10.1007/978-3-642-19318-7_45},pages={572--585},}
Learning of Multi-Dimensional, Multi-Modal Features for Robotic Grasping.
@phdthesis{detry2010d,author={Detry, Renaud},title={Learning of Multi-Dimensional, Multi-Modal Features for Robotic Grasping},year={2010},school={University of Liège},}
Adapting Preshaped Grasping Movements using Vision Descriptors.
Oliver
Kroemer, Renaud
Detry, Justus
Piater, and Jan
Peters.
In From Animals to Animats 11 – International Conference on the Simulation of Adaptive Behavior, Oct 2010.
@inproceedings{kroemer2010a,author={Kroemer, Oliver and Detry, Renaud and Piater, Justus and Peters, Jan},title={Adapting Preshaped Grasping Movements using Vision Descriptors},year={2010},booktitle={From Animals to Animats 11 -- International Conference on the Simulation of Adaptive Behavior},doi={10.1007/978-3-642-15193-4_15},pages={156--166},volume={6226},}
Learning Probabilistic Discriminative Models of Grasp Affordances under Limited Supervision.
Ayse
Erkan, Oliver
Kroemer, Renaud
Detry, Yasemin
Altun, Justus
Piater, and Jan
Peters.
In IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2010.
@inproceedings{erkan2010a,author={Erkan, Ayse and Kroemer, Oliver and Detry, Renaud and Altun, Yasemin and Piater, Justus and Peters, Jan},title={Learning Probabilistic Discriminative Models of Grasp Affordances under Limited Supervision},year={2010},booktitle={{IEEE/RSJ} International Conference on Intelligent Robots and Systems},doi={10.1109/IROS.2010.5650088},pages={1586--1591},}
Development of Object and Grasping Knowledge by Robot Exploration.
Dirk
Kraft, Renaud
Detry, Nicolas
Pugeault, Emre
Başeski, Frank
Guerin, Justus
Piater, and Norbert
Krüger.
IEEE Transactions on Autonomous Mental Development, Oct 2010.
@article{kraft2010a,author={Kraft, Dirk and Detry, Renaud and Pugeault, Nicolas and Başeski, Emre and Guerin, Frank and Piater, Justus and Krüger, Norbert},title={Development of Object and Grasping Knowledge by Robot Exploration},year={2010},doi={10.1109/TAMD.2010.2069098},journal={{IEEE} Transactions on Autonomous Mental Development},number={4},pages={368--383},volume={2},}
Learning Continuous Grasp Affordances by Sensorimotor Exploration.
Renaud
Detry, Emre
Başeski, Mila
Popović, Younes
Touati, Norbert
Krüger, Oliver
Kroemer, Jan
Peters, and Justus
Piater.
In From Motor Learning to Interaction Learning in Robots, Oct 2010.
@incollection{detry2010a,author={Detry, Renaud and Başeski, Emre and Popović, Mila and Touati, Younes and Krüger, Norbert and Kroemer, Oliver and Peters, Jan and Piater, Justus},title={Learning Continuous Grasp Affordances by Sensorimotor Exploration},year={2010},booktitle={From Motor Learning to Interaction Learning in Robots},doi={10.1007/978-3-642-05181-4_19},editor={Sigaud, Olivier and Peters, Jan},pages={451--465},publisher={Springer-Verlag},}
Combining Active Learning and Reactive Control for Robot Grasping.
Oliver
Kroemer, Renaud
Detry, Justus
Piater, and Jan
Peters.
@article{kroemer2010c,author={Kroemer, Oliver and Detry, Renaud and Piater, Justus and Peters, Jan},title={Combining Active Learning and Reactive Control for Robot Grasping},year={2010},doi={10.1016/j.robot.2010.06.001},journal={Robotics and Autonomous Systems},number={9},pages={1105--1116},volume={58},}
Refining Grasp Affordance Models by Experience.
Renaud
Detry, Dirk
Kraft, Anders Glent
Buch, Norbert
Krüger, and Justus
Piater.
In IEEE International Conference on Robotics and Automation, Oct 2010.
@inproceedings{detry2010b,author={Detry, Renaud and Kraft, Dirk and Buch, Anders Glent and Krüger, Norbert and Piater, Justus},title={Refining Grasp Affordance Models by Experience},year={2010},booktitle={{IEEE} International Conference on Robotics and Automation},doi={10.1109/ROBOT.2010.5509126},pages={2287--2293},}
Active Learning using Mean Shift Optimization for Robot Grasping.
Oliver
Kroemer, Renaud
Detry, Justus
Piater, and Jan
Peters.
In IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2009.
@inproceedings{kroemer2009a,author={Kroemer, Oliver and Detry, Renaud and Piater, Justus and Peters, Jan},title={Active Learning using Mean Shift Optimization for Robot Grasping},year={2009},booktitle={IEEE/RSJ International Conference on Intelligent Robots and Systems},doi={10.1109/IROS.2009.5354345},pages={2610--2615},}
@inproceedings{detry2009c,author={Detry, Renaud and Başeski, Emre and Krüger, Norbert and Popović, Mila and Touati, Younes and Kroemer, Oliver and Peters, Jan and Piater, Justus},title={Learning Object-specific Grasp Affordance Densities},year={2009},booktitle={{IEEE} International Conference on Development and Learning},doi={10.1109/DEVLRN.2009.5175520},pages={1--7},}
If first html tag is indented, and this include is called after a list, the html tag is considered a list element, and things go wrong. Leaving a hidden unindented line here
Autonomous Learning of Object-specific Grasp Affordance Densities.
Renaud
Detry, Emre
Başeski, Norbert
Krüger, Mila
Popović, Younes
Touati, and Justus
Piater.
In Approaches to Sensorimotor Learning on Humanoid Robots (Workshop at the IEEE International Conference on Robotics and Automation), Oct 2009.
@inproceedings{detry2009b,author={Detry, Renaud and Başeski, Emre and Krüger, Norbert and Popović, Mila and Touati, Younes and Piater, Justus},title={Autonomous Learning of Object-specific Grasp Affordance Densities},year={2009},booktitle={Approaches to Sensorimotor Learning on Humanoid Robots (Workshop at the IEEE International Conference on Robotics and Automation)},}
A Probabilistic Framework for 3D Visual Object Representation.
Renaud
Detry, Nicolas
Pugeault, and Justus
Piater.
IEEE Trans. Pattern Anal. Mach. Intell., Oct 2009.
@inproceedings{kraft2009b,author={Kraft, Dirk and Detry, Renaud and Pugeault, Nicolas and Başeski, Emre and Piater, Justus and Krüger, Norbert},title={Learning Objects and Grasp Affordances through Autonomous Exploration},year={2009},booktitle={International Conference on Computer Vision Systems},doi={10.1007/978-3-642-04667-4_24},pages={235--244},url={http://www.mip.sdu.dk/covig/publications/icvs2009CameraReady.pdf},volume={5815},}
Learning Visual Representations for Interactive Systems.
Justus
Piater, Sébastien
Jodogne, Renaud
Detry, Dirk
Kraft, Norbert
Krüger, Oliver
Kroemer, and Jan
Peters.
In International Symposium on Robotics Research, Oct 2009.
@inproceedings{piater2009a,author={Piater, Justus and Jodogne, Sébastien and Detry, Renaud and Kraft, Dirk and Krüger, Norbert and Kroemer, Oliver and Peters, Jan},title={Learning Visual Representations for Interactive Systems},year={2009},booktitle={International Symposium on Robotics Research},doi={10.1007/978-3-642-19457-3_24},}
3D Probabilistic Representations for Vision and Action.
Justus
Piater, and Renaud
Detry.
In Robotics Challenges for Machine Learning II (Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems), Oct 2008.
@inproceedings{piater2008b,author={Piater, Justus and Detry, Renaud},title={{3D} Probabilistic Representations for Vision and Action},year={2008},booktitle={Robotics Challenges for Machine Learning II (Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems)},}
Vision as Inference in a Hierarchical Markov Network.
Justus
Piater, Fabien
Scalzo, and Renaud
Detry.
In International Conference on Cognitive and Neural Systems, Oct 2008.
@inproceedings{piater2008a,author={Piater, Justus and Scalzo, Fabien and Detry, Renaud},title={Vision as Inference in a Hierarchical Markov Network},year={2008},booktitle={International Conference on Cognitive and Neural Systems},url={http://www.montefiore.ulg.ac.be/~detryr/publications/Piater-2008-ICCNS.pdf},}
Exploration and Planning in a Three-Level Cognitive Architecture.
D.
Kraft, E.
Başeski, M.
Popović, A. M.
Batog, A.
Kjær-Nielsen, N.
Krüger, R.
Petrick, C.
Geib, N.
Pugeault, M.
Steedman, T.
Asfour, R.
Dillmann, S.
Kalkan, F.
Wörgötter, B.
Hommel, R.
Detry, and J.
Piater.
In International Conference on Cognitive Systems (Workshop at the IEEE International Conference on Robotics and Automation), Oct 2008.
@inproceedings{kraft2008a,author={Kraft, D. and Başeski, E. and Popović, M. and Batog, A. M. and Kjær-Nielsen, A. and Krüger, N. and Petrick, R. and Geib, C. and Pugeault, N. and Steedman, M. and Asfour, T. and Dillmann, R. and Kalkan, S. and Wörgötter, F. and Hommel, B. and Detry, R. and Piater, J.},title={Exploration and Planning in a Three-Level Cognitive Architecture},year={2008},booktitle={International Conference on Cognitive Systems (Workshop at the IEEE International Conference on Robotics and Automation)},url={http://www.mip.sdu.dk/covig/publications/cogsys08.pdf},}
Probabilistic Pose Recovery Using Learned Hierarchical Object Models.
Renaud
Detry, Nicolas
Pugeault, and Justus H.
Piater.
In International Cognitive Vision Workshop (Workshop at the 6th International Conference on Vision Systems), Oct 2008.
@inproceedings{detry2008a,author={Detry, Renaud and Pugeault, Nicolas and Piater, Justus H.},title={Probabilistic Pose Recovery Using Learned Hierarchical Object Models},year={2008},address={Berlin, Heidelberg},booktitle={International Cognitive Vision Workshop (Workshop at the 6th International Conference on Vision Systems)},doi={10.1007/978-3-540-92781-5_9},pages={107--120},publisher={Springer-Verlag},url={http://www.montefiore.ulg.ac.be/~detryr/publications/Detry-2008-ICVW.pdf},}
Hierarchical Integration of Local 3D Features for Probabilistic Pose Recovery.
Renaud
Detry, and Justus H.
Piater.
In Robot Manipulation: Sensing and Adapting to the Real World (Workshop at Robotics, Science and Systems), Oct 2007.
@inproceedings{detry2007a,author={Detry, Renaud and Piater, Justus H.},title={Hierarchical Integration of Local {3D} Features for Probabilistic Pose Recovery},year={2007},booktitle={Robot Manipulation: Sensing and Adapting to the Real World (Workshop at Robotics, Science and Systems)},url={http://www.montefiore.ulg.ac.be/~detryr/publications/Detry-2007-RM.pdf},}
 DOI
DOI Bib
Bib PDF
PDF Video
Video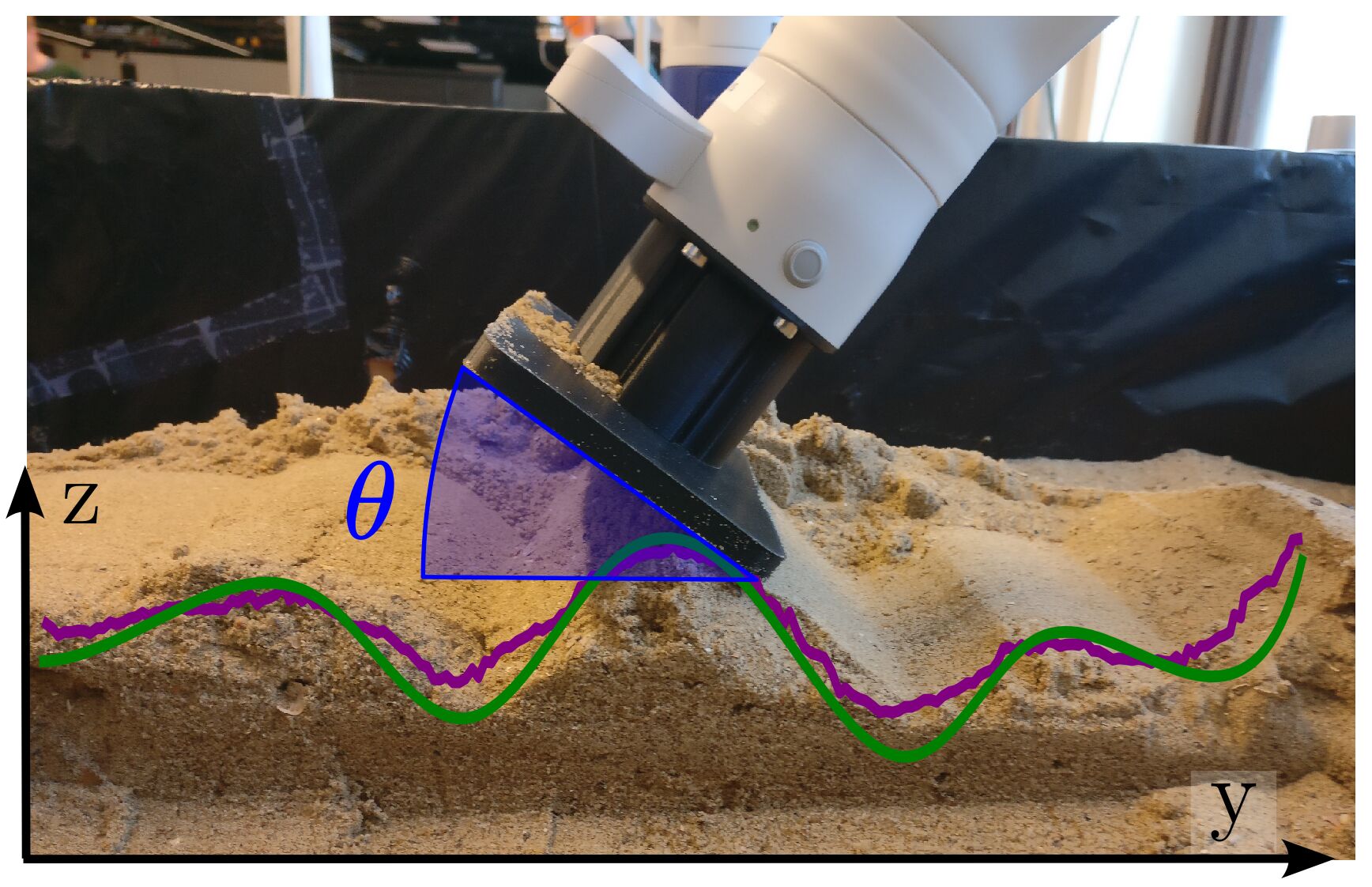
 arXiv
arXiv Blog
Blog