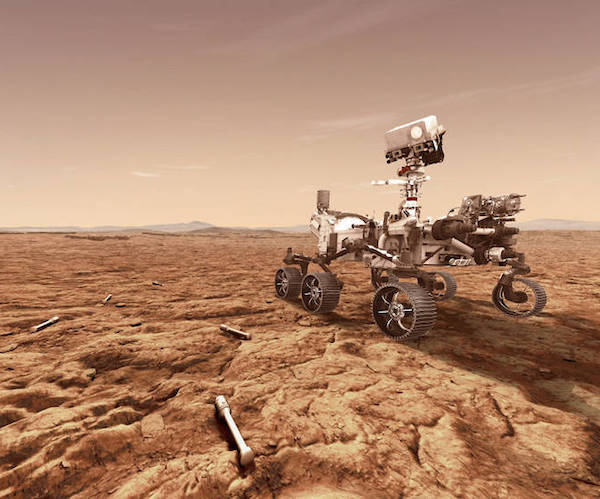
Mars Sample Return
Return Martian soil samples to Earth.
Period of Performance:
2016–2021
My role:
Machine-vision lead for NASA/JPL
Additional Contributors: Publication authors (see References below).
Project website:
mars.nasa.gov/msr/
|
Funded by NASA. |

|
Funded by NASA's Jet Propulsion Laboratory (JPL). |

Return Martian soil samples to Earth.
Period of Performance:
2016–2021
My role:
Machine-vision lead for NASA/JPL
Additional Contributors: Publication authors (see References below).
Project website:
mars.nasa.gov/msr/
|
|
Funded by NASA. |
|
|
Funded by NASA's Jet Propulsion Laboratory (JPL). |
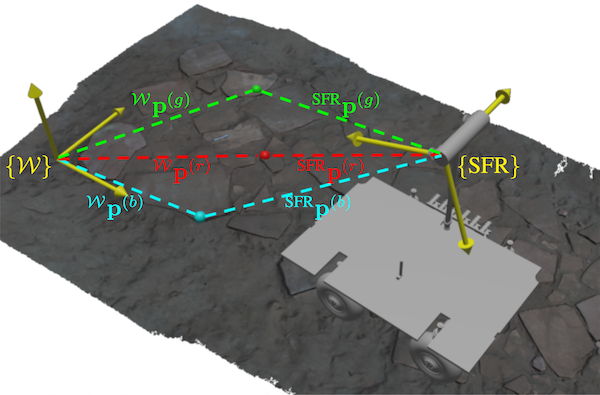
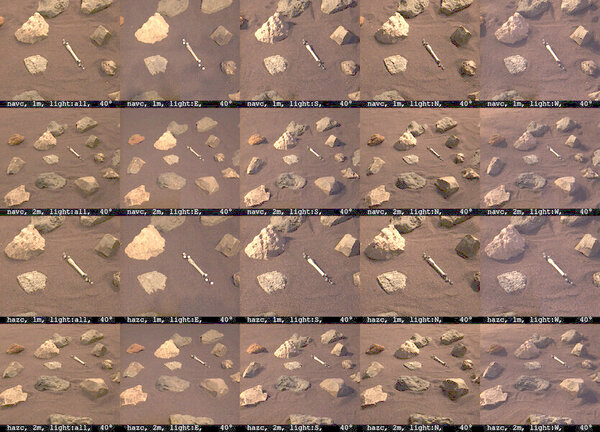
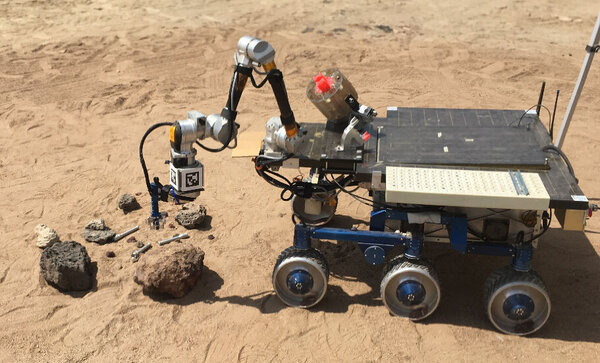
I led NASA/JPL’s MSR machine vision task (2017-2021). My team studied the feasibility of visually localizing and retrieving the 36 metal sample tubes that Perseverance is currently releasing on the ground at Jezero Crater. Our work critically informed the mission on what locations are suitable for the rover to place its tubes to maximize the probability that the tubes could be visually localized and retrieved by an autonomous rover [1], [2], [3], [4], [5].
 DOI
DOI Bib
Bib PDF
PDF